If you have ever used a scalpel to cut something tougher than an eraser, you can appreciate a hot knife or better yet, an ultrasonic cutter. Saws work too, but they have their own issues. [This Old Tony] uses a hobby store tool to cut some plastic and wood, then demos a commercial ultrasonic cutter to show how a blade can sail through with less brute force. The previous requires some muscle, finesse, and eventually a splash of Bactine antiseptic. The video can also be seen after the break.
This is more than a tool review, [Tony] takes it apart with a screwdriver and offers his snarky comments. On the plus side is that it cuts polystyrene well where a regular knife won’t do more than scratch or shatter it. Meanwhile in the negative category we don’t hear a definitive price, but they seem to cost half as much as his mini-lathe. If you need an estimated return on investment, consider the price of two-thousand X-acto blades, but you may also wish to factor in the reduced hand calluses. While you are shopping, maybe also think about a set of earplugs; when the video gets to 17:30 he tries to cut a ceramic fitting and manages to make a child-deafening screech instead. We warned you.
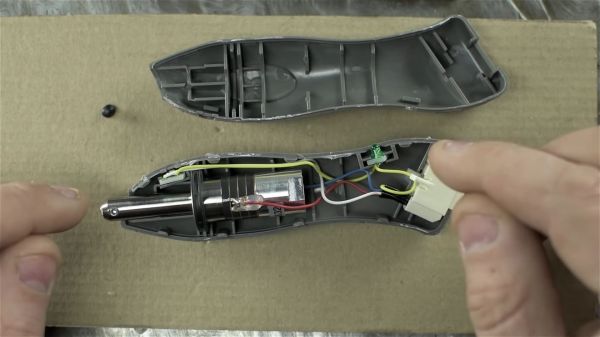
An ultrasonic knife is a blade that vibrates a tiny amount at a high frequency, giving the knife edge minor superpowers. It gets used much like any other blade, but it becomes far easier to cut through troublesome materials like rubber or hard plastics. I was always curious about them, and recently made my own by modifying another tool. It turns out that an ultrasonic scaling tool intended for dental use can fairly easily be turned into a nimble little ultrasonic cutter for fine detail work.
Cheap ultrasonic scaler. The blue disk is for adjusting power. Foot switch not shown.
I originally started thinking about an ultrasonic knife to make removing supports from SLA 3D prints easier. SLA resin prints are made from a smooth, hard plastic and can sometimes require a veritable forest of supports. These supports are normally removed with flush cutters, or torn off if one doesn’t care about appearances, but sometimes the density of supports makes this process awkward, especially on small objects.
I imagined that an ultrasonic blade would make short work of these pesky supports, and for the most part, I was right! It won’t effortlessly cut through a forest of support bases like a hot knife through butter, but it certainly makes it easier to remove tricky supports from the model itself. Specifically, it excels at slicing through fine areas while preserving delicate features. Continue reading “Making An Ultrasonic Cutter For Post-processing Tiny 3D Prints”→
With the high availability of low-cost modular electronic components, building your own little robot buddy is easier and more affordable than ever. But while the electronics might be dirt cheap thanks to the economies of scale, modular robot chassis can be surprisingly expensive. If you’ve got a 3D printer you can always make a chassis that way, but what if you’re looking for something a bit more artisanal?
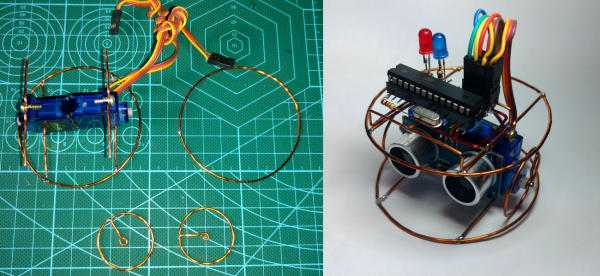
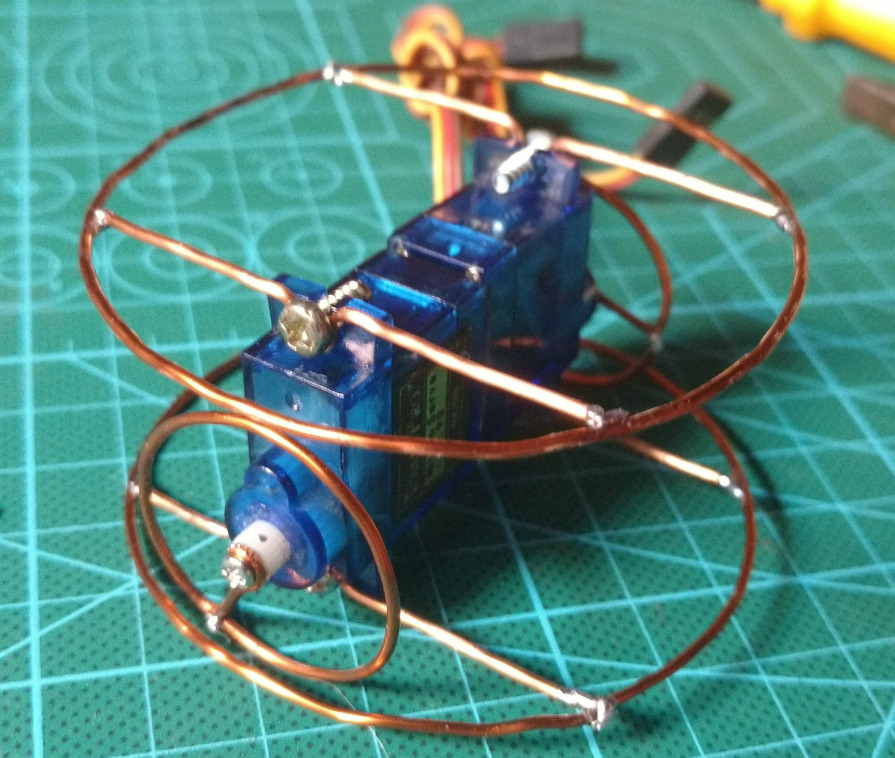
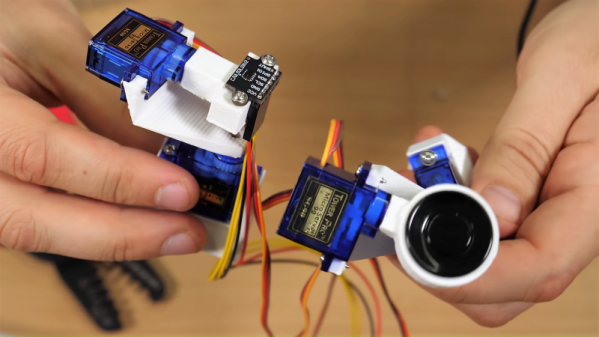
For his entry into the Circuit Sculpture Contest, [Robson Couto] has built a simple robot which dumps the traditional chassis for a frame made out of bent and soldered copper wire. Not only does this happen to look really cool in a Steampunk kind of way, it’s also a very cheap way of knocking together a basic bot with just the parts you have on hand. Not exactly a heavy-duty chassis, to be sure, but certainly robust enough to rove around your workbench.
The dual servos constrained within the wire frame have been modified for continuous rotation, which combined with the narrow track should make for a fairly maneuverable little bot. [Robson] equipped his servos with copper wheels built in the same style of the frame, which likely isn’t great for traction but really does help sell the overall look. If you aren’t planning on entering your creation into a contest that focuses on unique construction, we’d suggest some more traditional wheels for best results.
The brains of this bot are provided by an ATmega8 with external 16MHz crystal tacked onto the pins. There’s also a ultrasonic sensor board mounted to the servos which eventually will give this little fellow the ability to avoid obstacles. Of course, it doesn’t take a robotics expert to realize there’s currently no onboard power supply in the design. We’d love to say that he’s planning on using the copper loops of the frame to power the thing via induction, but we imagine [Robson] is still fiddling around with the best way to get juice into his wireframe creation before the Contest deadline.
Speaking of which, there’s still plenty of time to get your own Circuit Sculpture creation submitted. If it’s a functional device that isn’t scared to show off the goods, we’re interested in seeing it. Just document the project on Hackaday.io and submit it to the contest before the January 8th, 2019 deadline.
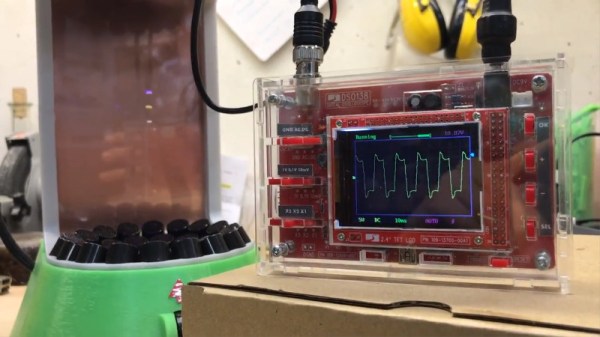
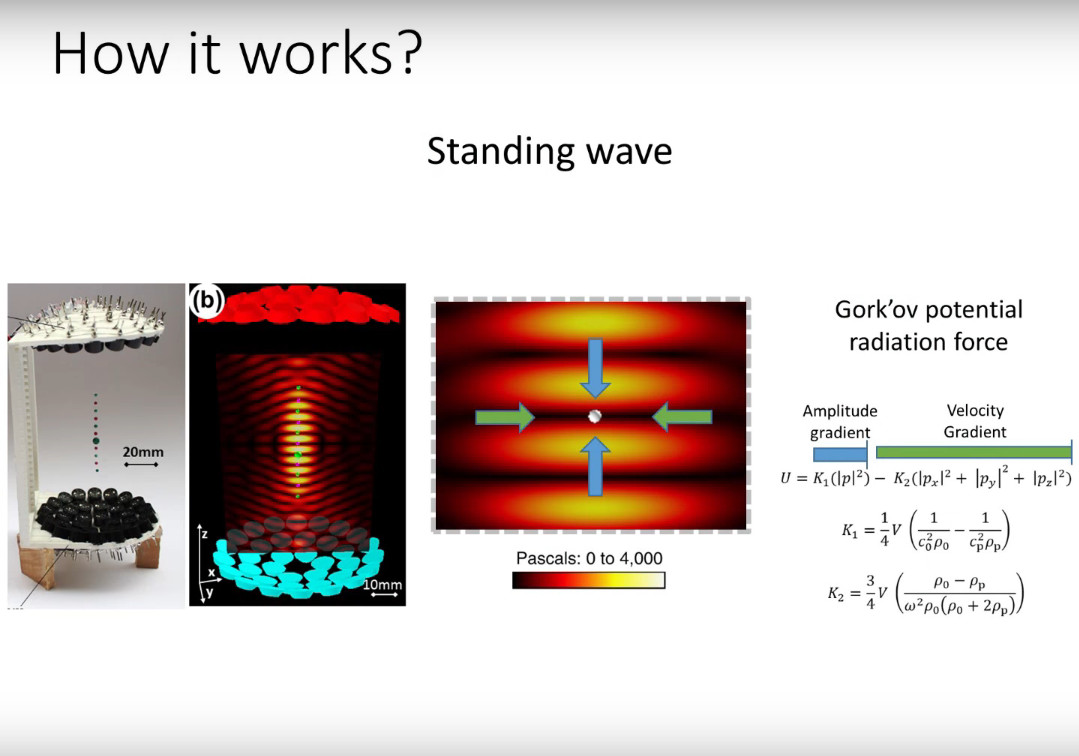
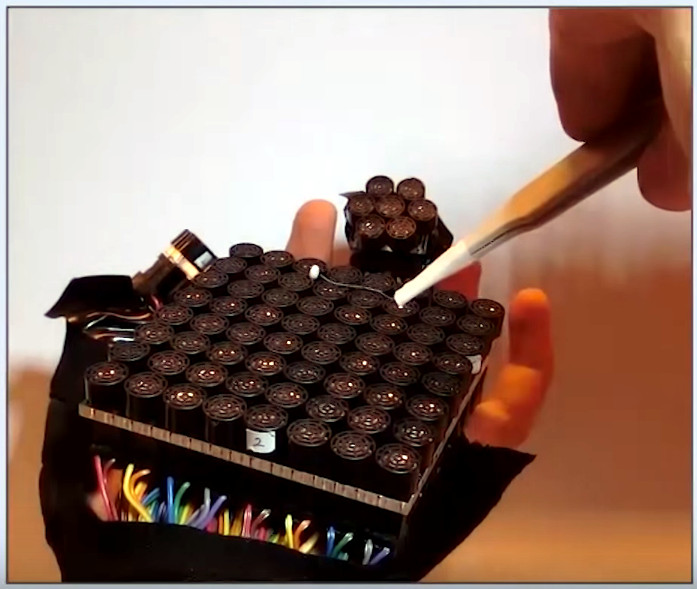
The build relies on an astounding number of ultrasonic transducers – 72, in fact. The device operates at 40 kHz to be well above the human range of hearing. 36 each are placed in the top and bottom shells of the device’s 3D printed chassis. Through careful construction, the transducers are placed an integer multiple of half the wavelength apart. This allows the device to create a standing wave, with several low-energy nodes in which small objects can be levitated. In this case, [Julius] uses small scraps of styrofoam, but notes that water droplets can also be used if one is careful to avoid spilling any on the electronics.
The transducers are energised with a square wave generated by an Arduino Nano. This allows the possibility of the frequency and phase of the wave to be altered, which can help tune the device and allow some movement in the vertical axis. Unfortunately, movement in the other axes isn’t possible as the transducers appear to be connected in parallel. However, this could be a good upgrade in a later revision.
This project shows that a device relying on incredibly precise measurement and control can now be constructed at home with a 3D printer and some off the shelf electronics.
We don’t think [bleepbit] will take offense when we say the “poor man’s theremin” looks cheesy — after all, it was built in a cheese container. Actually, it isn’t a bad case for a simple device, as you can see in the picture and the video below. Unlike a traditional theremin, the device uses ultrasonics to detect how far away your hand is and modifies the sound based on that.
There are also two buttons — one to turn the sound off and another to cycle through some effects. We liked how it looked like a retro cassette, though. The device uses a cheap Arduino clone, but even with a real Arduino, the price wouldn’t be too bad. However, the price tag quoted doesn’t include a few connectors or the speaker that appears in the schematic. There’s a note that the model built uses a jack instead of a speaker, but it would be nice to include both and use the kind of jack that disconnects the speaker when you plug speakers or headphones in.
We’ve all seen acoustic levitation, it’s one of the scientific novelties of our age and a regular on the circuit of really impressive physical demonstrations of science to the public. The sight of arrays of ultrasonic speakers causing small objects and beads of liquid to float in mid-air without any suspension is magical, captivating people of all ages. Thus a lecture at Hackaday Belgrade on the subject from Asier Marzo, a research scientist with a speciality in the field of ultrasonics at the UK’s University of Bristol, was a particularly fascinating and informative one.
He started by explaining acoustic levitation as a concept, and its mechanism. As an idea it’s one with a long history, he tells us that hundreds of years ago people tried mass ranks of the loudest musical instruments at their disposal to move rocks, all to no avail. The array of musicians of yore lacked the ability to control their individual phase, and of course their combined output would have balked at a pea-sized piece of gravel, let alone a boulder.
Explaining the standing wave produced by an ultrasonic array.
The Power of Standing Waves
Given that we can now create standing waves between phased arrays of ultrasonic speakers, he explained the mechanism that allows the levitation. The standing wave creates patterns of high intensity and “quiet” low intensity sound, and the object nestles in one of these quiet areas. There is thus a size limit dictated by the wavelength of the sound in question, which for the ultrasound he’s using is in the order of a few millimetres.
Having explained how it all works, we were then taken into the fields in which it finds an application. This was particularly interesting, because it’s the side we never see in the for-the-kids demos where it’s all about “Look, we can make the water droplet float!”. The number of fields that can find a use for it was a surprise, and formed the next phase of the talk.
Real World Uses for Acoustic Levitation
The first example given was in the field of spectroscopy, when reflecting light from a droplet of liquid on a substrate a certain amount of the reflected light comes from the substrate. If the sample is levitated, all the reflection comes from it and nothing else. Microgravity experiments are another interesting application, where it is possible to replicate some of the work that has previously required the environment of a space craft such as the International Space Station. This was a particularly unexpected twist.
Manipulating a solid particle with a wearable array.
The technique can be used for tiny particles in a liquid medium with a much higher frequency — a demonstration involves moving a single blood cell in a pattern. But Asier has more tricks up his sleeve. This technique can be used in human interactions with computers and with the real world. We saw a display in which the pixels were small plastic balls suspended in a grid, they could even be flipped in colour by being rotated under an electric field. A successive display used the balls not in a grid but as a point cloud in a graph, proving that rasters are not the only means of conveying information. Finally we saw the arrays applied to wearable devices, a handheld tractor beam, and a set of standing wave tweezers. He gave the example of picking up an SMD component, something that we can see would be invaluable.
Levitation is Within Our Grasp
The good news for us is that this is a piece of cutting-edge science that is accessible to us at our level too. He’s made a selection of designs available online through the Acoustic Levitator site. There is an ultrasonic array, an acoustic levitator, and an acoustic tractor beam, and the components are such run-of-the-mill parts as Arduinos and motor driver boards. Even schoolchildren building them from kits, with an experimenter using one for Schlieren photography of the acoustic field. Finally we’re shown Ultraino, an ambitious project providing software and driver hardware for large arrays in which every transducer is individually driven, before a tantalising look at future work in fluid ultrasonics and the promise of an ultrasonic audio speaker project.
Hackaday covers a huge array of projects and topics from all corners of our community. Each one is exciting in its own way, from a simple-looking Arduino project that encapsulates a cool hack to a multi-year labour of love. It’s not often though that we can say we’ve seen a genuinely cutting-edge piece of science, while simultaneously having it explained in terms we understand and being given an accessible version that we can experiment with ourselves. We are really looking forward to the projects that will come from this direction, as acoustic levitation becomes yet another known quantity in the hardware hacker’s armoury.
Sometimes the best you can say about a project is, “Nice start.” That’s the case for this as-yet awful DIY 3D scanner, which can serve both as a launching point for further development and a lesson in what not to do.
Don’t get us wrong, we have plenty of respect for [bitluni] and for the fact that he posts his failures as well as his successes, like composite video and AM radio signals from an ESP32. He used an ESP8266 in this project, which actually uses two different sensors: an ultrasonic transducer, and a small time-of-flight laser chip. Each was mounted to a two-axis scanner built from hobby servos and 3D-printed parts. The pitch and yaw axes move the sensors through a hemisphere gathering data, but unfortunately, the Wemos D1 Mini lacks the RAM to render the complete point cloud from the raw points. That’s farmed out to a WebGL page. Initial results with the ultrasonic sensor were not great, and the TOF sensor left everything to be desired too. But [bitluni] stuck with it, and got a few results that at least make it look like he’s heading in the right direction.
We expect he’ll get this sorted out and come back with some better results, but in the meantime, we applaud his willingness to post this so that we can all benefit from his pain. He might want to check out the results from this polished and pricey LIDAR scanner for inspiration.