For those of you rushing to the comment section after reading the title to tell [Ben Dauphinee] that his DIY land surveying efforts are for naught because only a licensed surveyor can create a legally binding property description, relax — he already knows. But what he learned about centimeter-resolution GPS is pretty interesting, especially for owners of large rural properties like him.
[Ben]’s mapping needs are less rigorous than an official survey; he just wants to get the locations of features like streams and wood lines, and to get topographic elevations so that he has a general “lay of the land” for planning purposes. He originally engaged a surveyor for that job, but after shelling out $4,600 to locate a single property line, he decided to see what else could be done. Luckily, real-time kinematics, or RTK, holds the key. RTK uses a fixed GPS station to provide correction signals to a mobile receiver, called a rover. If the fixed station’s position is referenced to some monument of known position, the rover’s position can be placed on a map to within a couple of centimeters.
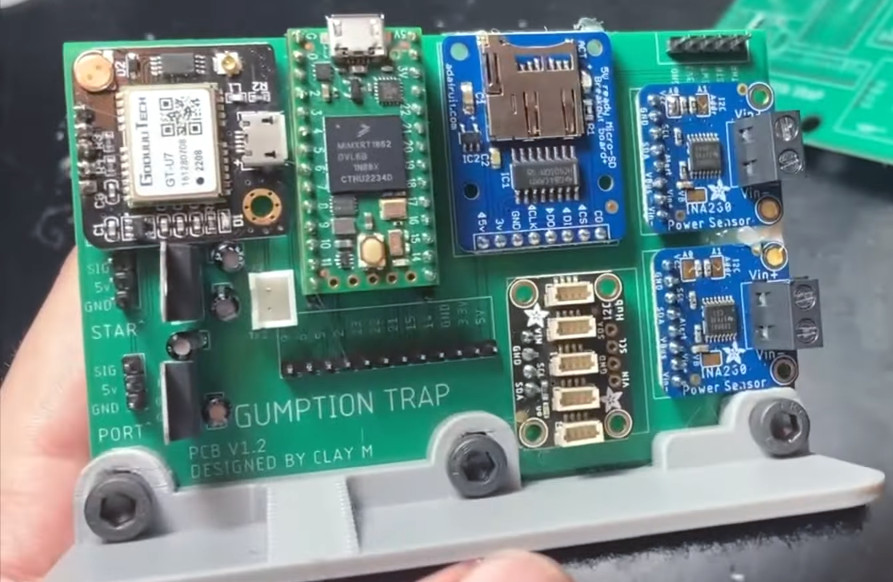
To build his own RTK system, [Ben] used some modules from SparkFun. The fixed station has an RTK breakout board and a multi-band GNSS antenna to receive positioning data, along with a Raspberry Pi to run the RTK server. An old iPhone with a prepaid SIM provides backhaul to connect to the network that provides correction data. [Ben]’s rover setup also came mainly from SparkFun, with an RTK Facet receiver mounted on a photographer’s monopod. Once everything was set up and properly calibrated, he was able to walk his property with the rover and measure locations to within 4 centimeters.
This was not an inexpensive endeavor — all told, [Ben] spent about $2,000 on the setup. That’s a lot, especially on top of what he already paid for the legal survey, but still a fraction of what it would have cost to have a surveyor do it, or to buy actual surveyor’s equipment. The post has a ton of detail that’s worth reading for anyone interested in the process of mapping and GPS augmentation.