The Project Horus team routinely launches high-altitude balloons in Australia. However, despite their desire for it, they haven’t beamed back live video. Until now. Horus 55 beamed video back to the ground from over 100,000 feet using a Raspberry Pi and some software-defined radio gear. Be sure and check out their video, below.
You might think this is easy, but there are many technical hurdles. First, the transmitter needs some power, but the thin atmosphere creates problems with cooling. In addition a really good receiving station is required, and the project wanted to stream that video to the Internet, which they were able to do.
The balloon carried a Raspberry Pi Zero W to capture and compress video. A LimeSDR Mini provided the DVB-S transmission on 70cm along with a power amplifier to get to about 800mW. Power dissipation in the payload was about 6 watts and required a special heat sink system to operate. The payload was powered by eight lithium AA primary cells, which perform well at low temperatures.
[Dave Akerman]’s ongoing high altitude balloon (HAB) work is outstanding, and we’re all enriched by the fact that he documents his work like he does. Recently, [Dave] wrote about his balloon tracker based on the Raspberry Pi Pico, whose capabilities brought a couple interesting features to the table.
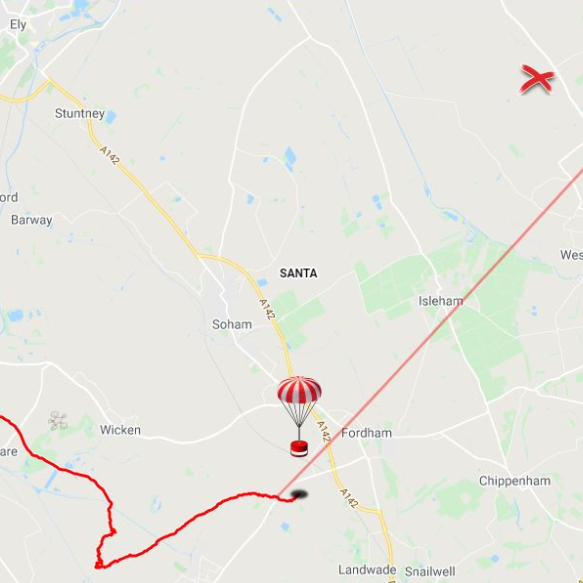
In a way, HAB trackers have a fairly simple job: read sensors such as GPS and constantly relay that data to someone on the ground so that the balloon’s location can be tracked, and the hardware recovered when it ultimately returns to Earth. There are a lot of different ways to do this tracking, and one thing [Dave] enjoys is getting his hands on a new board and making a HAB tracker out of it. That’s exactly what he has done with the Raspberry Pi Pico.
Nothing builds familiarity like actually using a part, and the Pico had some useful things to contribute to a HAB tracker application. For one thing, the Pico has an onboard buck-boost converter that allows it to be powered from a relatively wide voltage range (~1.8 V to 5.5 V), so running it directly from batteries is both possible and desirable from a tracker perspective. But a really useful feature was possible thanks to the large amount of memory on the Pico: dynamic landing prediction.
[Dave] does landing prediction prior to launch based on environmental conditions, but it’s always better if the HAB tracker can also calculate its own prediction based on actual observed events and conditions. A typical microcontroller board like an Arduino doesn’t have enough memory to store the required data upon which to do such calculations, but the Pico does so easily. [Dave]’s new board transmits an updated landing site prediction along with all the rest of the telemetry, making the retrieval process much more reliable.
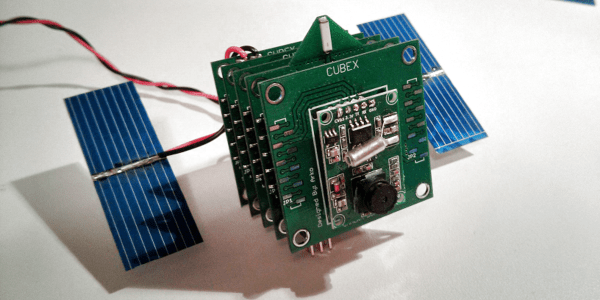
A key challenge for any system headed up into the upper-atmosphere region sometimes called near space is communicating back down to the ground. The sensors and cameras onboard many high altitude balloons and satellites aren’t useful if the data they collect can’t be retrieved. Often times, custom antennas or beacons are added to help. Looking at the cost and difficulty of the problem, [arko] and [upaut] teamed up to try and make a turn-key solution for any near-space enthusiast by building CUBEX, a wonderful little module with sensors and clever radio that can be easily reused and repurposed.
CUBEX is meant as a payload for a high-altitude balloon with a camera, GPS, small battery, solar cell, and the accompanying power management circuits. The clever bit comes in the radio back down. By using the 434.460 Mhz band, it can broadcast around a hundred miles at 10mW. The only hardware to receive is a radio listener (a cheap RTL USB stick works nicely). Pictures and GPS coordinates stream down at 300 baud.
Their launch was quite successful and while they didn’t catch a solar eclipse, their balloon reached an impressive 33698m (110,560ft) while taking pictures. Even though it did eventually splashdown in the Pacific Ocean, they were able to enjoy a plethora of gorgeous photos thanks to their easy and cost-effective data link.
Tech history is rife with examples of bizarre product demos, but we’ve got to think that Elon Musk’s Neuralink demo this week will have to rank up there with the weirdest of them. Elon’s job here was to sell the proposition that having a quarter-sized plug removed from your skull by a surgical robot and having it plunge 1,024 tiny wires into your gray matter will be totally normal and something that all the cool kids will be doing someday. We watched the 14-minute supercut of the demo, which went on for considerably longer than that due to the realities of pig wrangling, and we remain unsold on the technology. Elon selling it as “a Fitbit in your skull, with tiny wires” probably didn’t help, nor did the somewhat terrifying appearance of the surgical robot needed to do the job. On the other hand, Gertrude the Bionic Pig seemed none the worse for her implant, which was reportedly wired to her snout and sending data wirelessly. The demonstration of reading joint positions directly from the brain was honestly pretty neat. If you want to dive deeper into Neuralink, check out Maya’s great article that separates fact from science fiction.
Jerry Carr, NASA astronaut and commander of the third and final crewed Skylab mission, passed away this week at the age of 88. Carr’s Skylab 4 mission was record-breaking in 1974, with the three astronauts living and working in the orbiting workshop for 84 days. The mission contributed a vast amount of information on space medicine and the human factors of long-duration spaceflight. Carr retired from NASA in 1977 and had a long career as an engineer and entrepreneur. It’s sad to lose yet another of the dwindling number of heroes remaining from NASA’s manned-flight heyday.
Speaking of spaceflight, the closest most of us DIYers can get to space is likely courtesy of a helium-filled balloon. If you’ve ever considered sending something — or someone — aloft, you’ll find this helium balloon calculator an invaluable tool. Just plug in the weight of your payload, select from a few common balloon sizes, and the calculator will tell you how many you need and how much gas it will take to fill them. It’s got a second section that tells you how many more balloons it’ll take to get to a certain altitude, should merely getting off the ground not be enough for you.
If 2020 has proven anything, it’s that time is, at best, a negotiable concept. Improbably, September is only a day away, after an August that somehow took forever to go by in the blink of an eye. With that in mind, October is OSHWA’s Open Hardware Month, with this year’s theme being “Label and Certify”. We’re a little bit in love with the Open Hardware Facts generator, which takes your open-source hardware, software, and documentation license and generates a USDA “Nutrition Facts”-style label for your product. They’ve also added tools to make it easier to get OSHWA certification for your project.
And finally, what would it be like to pilot a giant exoskeleton? Like, a 9,000 pound (4,100 kg), quadrupedal all-terrain beast of a mech? Turns out you can (theoretically) find out for yourself courtesy of Furrion Exo-Bionics and their monster mech, dubbed Prosthesis. The machine has been in development for a long time, with the vision of turning mech racing into the next big thing in sports entertainment. Their Alpha Mech Pilot Training Program will allow mere mortals to learn how to pilot Prosthesis at the company’s proving ground in British Columbia. Details are sparse, so caveat emptor, but it sure looks like fun.
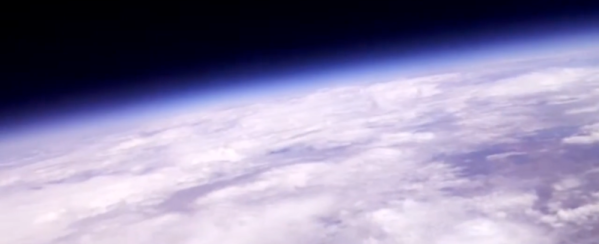
The Cope brothers are our hosts this week. Jeremy, a computer engineer, and Jason, a mechanical engineer, have recently caught the high-altitude ballooning (HAB) bug. In their initial flights they’ve racked up some successes and pushed the edge of space with interesting and varied missions. Their first flight just barely missed the 100,000 foot (30,000 meter) mark and carried a simple payload package of cameras and GPS instruments and allowed them to reach their goal of photographing the Earth’s curvature.
Flight 2 had a similar payload but managed to blow through the 100K foot altitude, capturing stunning video of the weather balloon breaking. Their most recent flight carried a more complex payload package, consisting of the usual camera and GPS but also a flight data recorder of their own devising, as well as a pair of particle detectors to measure the change in flux of subatomic particles with increasing altitude. That flight “only” reached 62,000 ft (19,000 meters) but managed to hitch a ride on the jet stream that nearly took the package out to sea.
The Cope brothers will be joining the Hack Chat to talk about the exciting field of DIY high-altitude ballooning and the challenges of getting a package halfway to space (depending on how that’s defined). Please join us as we discuss:
The basics of flight – balloons, rigging, payload protection, tracking, and recovery;
Getting started on the cheap;
Making a flight into a mission with interesting and innovative ideas for payload instrumentation;
Will hobbyist HABs ever break the Kármán Line? and
You are, of course, encouraged to add your own questions to the discussion. You can do that by leaving a comment on the High-Altitude Ballooning Hack Chat event page and we’ll put that in the queue for the Hack Chat discussion.
Writing this in the frigid darkness of a Northern Hemisphere January evening, I have to admit to more than a little envy of Samy Kamkar and his friends. One of their summer events is a private party at a secluded campground somewhere that looks quite warm, which from here seems mighty attractive.
Samy wanted to provide a spectacle for his friends. What he came up with is glowing orbs; LED balloons that would float above the campsite and wow his friends with their pretty synchronised illumination. Thus an adventure in wireless communications, lighter-than-air flammable gasses versus electronics weight calculations, and code optimization began, the details of which were shared in Samy Kamkar’s 2018 Hackaday Superconference talk embedded below.
We always think that crossing the Atlantic in a blimp would be very serene — at least once they put heaters on board. The Hindenburg, the R-101, and the Shenandoah put an end to the age of the airship, at least for commercial passenger travel. But you can still fly your own with a helium balloon and some electronics. One notable project — the Blimpduino — has evolved into the Blimpduino 2. The open-source software is on GitHub. We couldn’t find the PCB layout, so we aren’t sure if it is or will be open. The 3D printed parts are available, though.
The PCB is the heart of the matter, a four-layer board with an ARM M0 processor, an ESP8266 WiFi module, four motor outputs, two servo motor outputs, a 9-axis inertial navigation system, an altimeter, and a forward object detection system. There’s also a battery charger onboard.