Ever wanted to bend plywood but don’t have the equipment or the space to use it? Whatever the issue, dust off those project ideas and take a look at [Ryo Kosaka]’s experimental bending jig.All you need are some boards, a couple of fasteners, and [Ryo]’s 3-D printed connectors.
This is quite the elegant solution for bending in a small space with little noise. The main departure from standard bending methods is that instead of making the bend by clamping the veneers between a pair of positive and negative mold halves, most of the clamping pressure comes from air pumped into a rubber ball. That’s not even the best part: not only is the mold reconfigurable, it’s modular. Want another bend in your thing? Just print another connector and grab another piece of wood.
[Ryo]’s pivoting connectors screw into the end of one board and move freely along the length of a second board. Once the bend angle is dialed up, he locks it in place with a bolt. For the first test, [Ryo] made a lamp base with two bends.The jig worked great except for a small gap that didn’t get enough clamping pressure from the ball. We wonder if rotating the jig during the process would have let gravity address the issue. For the second test, [Ryo] added another piece to make the jig rectangular and made a floating wall shelf. Bend your way past the break for the video version.
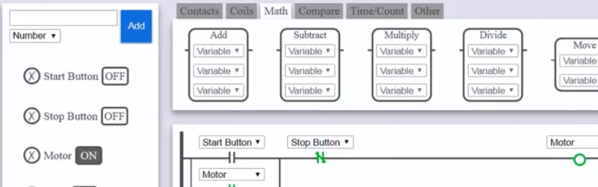
If your usual tools are the Arduino and the Raspberry Pi, you might find it surprising that the industrial world tends to run on Programmable Logic Controllers, or PLCs. You can think of a PLC as a very rugged industrial Arduino, but it’s best not to take that analogy too far. Some PLCs are very simple and some are quite complex, but one thing they do have in common is they are usually programmed using ladder logic. If you’ve ever wanted to learn how to program PLCs — a very marketable job skills in some places — you can now build and simulate ladder logic in your browser. [Garry Shortt] has a video walkthrough of the tool, that you can see below.
If you are used to conventional programming, you may find ladder logic a little frustrating. Originally, it was a documentation tool for relay logic but has grown to handle modern cases. It may actually help you to not think of it so much as a programming language, instead as a tool for drawing relay schematics. Contacts can be normally open or closed and in series or parallel to form AND and OR gates, for example, while coils can activate contacts.
Air Traffic Controllers use Automatic Dependent Surveillance-Broadcast (ADS-B) as an alternative to secondary radar to track aircraft. The ADS-B is transmitted by the aircraft and contains information such as GPS position, pressure, altitude, and callsign among other things at a 1090 MHz frequency, which can be decoded using any of a number of software tools.
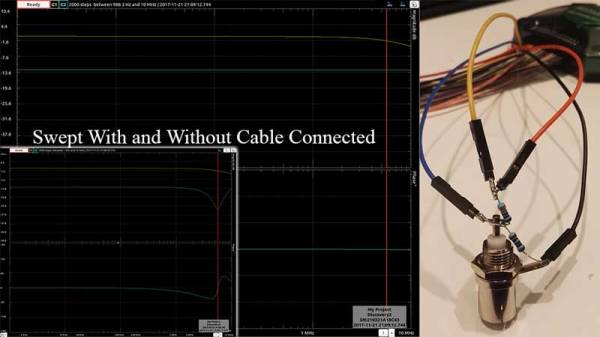
[Mike Field] lives near an airport, and decided he wanted to peek into the tracking signals for fun. He turned to an RTL-based TV Dongle. Since the stock antenna was not cutting it, he decided to make one specifically for the 1090 MHz signal. His design is based on Coaxial Collinear Antenna for ADS-B Receiver by [Dusan Balara] which uses pieces of the coaxial cable cut to the right length. There are a number of calculations involved in determining the size of the cable, however, the hack in this design is the way he uses a USB based oscilloscope to measure the speed of RF waves inside the line in question.
We reached out to [Mike], and this is what he had to say. The idea is to use a cable of half the size of the wavelength which is calculated as
lambda = c/f
For the best reception, the sections of coax need to be half a wavelength long – but the wavelength of the signal inside the coax, which is shorter than the wavelength in free space. As this was a generic cable he had no idea of the dielectric that separates the core from the shield, so the ‘velocity factor’ could be anything depending on the exact composition.
To determine the speed of the signal in the cable, his approach omits the more expensive equipment. A length of coax acts as a stub – any energy that is sent into the cable reaches the far end of the transmission line and is then reflected back to the source. When the cable is 1/4th of the wavelength long, the reflected signal arrives back at the start of the signal 180 degrees out of phase – in a perfect world it would completely null out the input signal. Continue reading “Measuring HF Signal Speeds In A DIY Coaxial Collinear Antenna”→
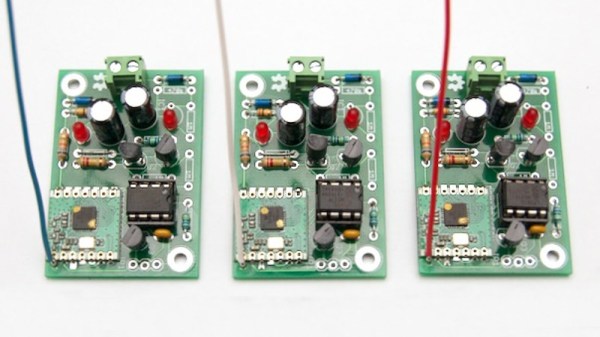
Low power devices are always intriguing, as they open up possibilities for applications with the need to operate remotely, or for very long periods without attention. There are all manner of techniques for powering such devices, too, such as using solar panels, super capacitors, or other fancy devices. The Micro Power Snitch is one such device, which can report wirelessly on your AC-powered appliances.
The device is built around a tiny ARM microcontroller and an RFM69 radio module. The entire circuit is run by leeching power from an AC current transformer, wrapped around one of the power lines of an AC appliance. When an appliance draws over the minimum threshold current (500W on 230VAC, 250W on 115VAC), the device sends a packet out, which can be received and logged at the other end.
The best part of this project, however, is the writeup. The project is split into an 8-part series, breaking down the minutiae of the concepts at work to make this possible. It’s a great primer if you’re interested in designing low-power devices.
Sarah Petkus is a robot mom (which means she’s the mother to a robot, not that Sarah herself is a robot, at least as far as we’re aware), whose child, Noodle Feet, is a character in Sarah’s graphic novel Gravity Road. Unlike every other robot on the planet, Noodle Feet is a content-based robot. Instead of robotic arms welding car panels together or 3D printers squiring out goo, Noodle Feet isn’t a robot built for a specific function. Noodle Feet’s design is derived from his personality in his graphic novel. In the graphic novel, Noodle Feet tastes with his feet, clambers over rocks, and explores his surroundings. That’s what the real-life version of Noodle Feet must do, and that means building the hardware to do just that.
Sarah has been working on Noodle Feet for about two years now, and last year she presented a talk about tasting feet and salivating toes. It’s odd, yes, but it is a fantastic exploration of what can be done with robotics.
This year, Sarah had the opportunity to be an artist in residence at ESA, where Noodle Feet could at least test out his dream of living on Mars. There, Noodle Feet played around in the ESA’s Mars yard, where he made friends with a copy of the ExoMars rover.
If you have a car parked outside as you are reading this, the overwhelming probability is that it has a reciprocating piston engine powered by either petrol(gasoline), or diesel fuel. A few of the more forward-looking among you may own a hybrid or even an electric car, and fewer still may have a piston engine car powered by LPG or methane, but that is likely to be the sum of the Hackaday reader motoring experience.
We have become used to understanding that perhaps the era of the petroleum-fueled piston engine will draw to a close and that in future decades we’ll be driving electric, or maybe hydrogen. But visions of the future do not always materialize as we expect them. For proof of that, we only need to cast our minds back to the 1950s. Motorists in the decade following the Second World War would have confidently predicted a future of driving cars powered by jet engines. For a while, as manufacturers produced a series of prototypes, it looked like a safe bet.
The Chrysler gas turbine car from [Bryan]’s article. CZmarlin [Public domain].Back in August, my colleague [Bryan] wrote a feature: “The Last Interesting Chrysler Had A Gas Turbine Engine“, in which he detailed the story of one of the more famous gas turbine cars. But the beautifully styled Chrysler was not the only gas turbine car making waves at the time, because meanwhile on the other side of the Atlantic a series of prototypes were taking the gas turbine in a slightly different direction.
Rover was a British carmaker that was known for making sensible and respectable saloon cars. They passed through a series of incarnations into the nationalized British Leyland empire, eventually passing into the hands of British Aerospace, then BMW, and finally a consortium of businessmen under whose ownership they met an ignominious end. If you have ever wondered why the BMW 1-series has such ungainly styling cues, you are looking at the vestiges of a Rover that never made it to the forecourt. The very successful Land Rover marque was originally a Rover product, but beyond that sector, they are not remembered as particularly exciting or technically advanced.
The Rover JET1 prototype. Allen Watkin [CC BY-SA 2.0].At the close of the Second World War though, Rover found themselves in an interesting position. One of their contributions to war production had been the gas turbine engines found in the first generation of British jet aircraft, and as part of their transition to peacetime production they began to investigate civilian applications for the technology. Thus the first ever gas turbine car was a Rover, the 1950 JET1. Bearing the staid and respectable styling of a 1950s bank manager’s transport rather than the space-age look you might expect of the first ever gas turbine car, it nonetheless became the first holder of the world speed record for a gas turbine powered car when in 1952 it achieved a speed of 152.691 MPH.
The JET1 was soon followed by a series of further jet-powered prototypes culminating in 1956’s T3 and 1961’s T4. Both of these were practical everyday cars, the T3, a sports coupé, and the T4, an executive saloon car whose styling would appear in the 1963 petrol-engined P6 model. There was also an experimental BMC truck fitted with the engine. The P6 executive car was produced until 1977, and all models were designed to have space for a future gas turbine option by having a very unusual front suspension layout with a pivot allowing the spring and damper to be placed longitudinally in the front wing.
The Rover-BRM racing car at Gaydon. David Merrett [CC BY 2.0].It was not only prototypes for production cars with gas turbines that came from Rover in the 1960s though, for in 1963 they put their gas turbine into a BRM racing chassis and entered it into the Le Mans 24 hour endurance race. It returned in the 1964 season fitted with a novel rotating ceramic honeycomb heat exchanger to improve its efficiency, racing for a final season in 1965.
The fate of the gas-turbine Rovers would follow that of their equivalent cars from other manufacturers including the Chrysler covered by [Bryan]. Technical difficulties were never fully overcome, the increasing cost of fuel made gas turbine cars uneconomic to run, and meanwhile by the 1960s the piston engine had improved immeasurably over what had been available when the JET1 had been produced. The Rover P6 never received its gas turbine, and the entire programme was abandoned. Today all the surviving cars are in museums, the JET1 prototype in the Science Museum in London, and the T3, T4, and Rover-BRM racing car at the Heritage Motor Centre at Gaydon. The truck survives in private hands, having been restored, and is a regular sight at summer time shows.
As a footnote to the Rover story, in response to the development of JET1 at the start of the 1950s, their rival and later British Leyland stablemate Austin developed their own gas turbine car. If international readers find Jet1’s styling a bit quaint compared to the American jet cars, it is positively space-age when compared to the stately home styling of the Sheerline limousine to which Austin fitted their gas turbine.
Open Source is how the world runs. Somewhere, deep inside the box of thinking sand you’re sitting at right now, there’s code you can look at, modify, compile, and run for yourself. At every point along the path between your router and the horrific WordPress server that’s sending you this webpage, there are open source bits transmitting bytes. The world as we know it wouldn’t exist without Open Source software.
That said, how does someone contribute to Open Source? Maintainers do like to build their own little kingdoms, so how does anyone break into developing Open Source hardware and software?
Our guest for this Hack Chat will be Robert Wolff, technical writer, and Open Source evangelist who has a history of working in and around STE*M-based educational programs. Right now, Robert is the community manager for 96Boards at Linaro. 96Boards is a hardware specification to make the latest ARM-based processors available at a reasonable cost. This open specification defines a standard board layout for SoC-agnostic platforms that can be used by any application, device, and kernel by system software developers.
The questions we’ll be looking at during this Hack chat is how to contribute to Open Source projects, how to do that using 96Boards, the technical challenges involved in documenting an Open system, the difficulty in designing a processor-agnostic system, and general questions about the 96Boards community, ecosystem, and resources.
As always, we’re going to be taking questions from the hackaday.io community, so if you have a question, drop it on the Hack Chat event page.
Our Hack Chats are live community events on the Hackaday.io Hack Chat group messaging. These Hack Chats usually happen at Noon, Pacific time, on Friday. This week, everything is going down on Noon, PST, Friday, December 8th. Don’t have any idea what time that is on your meridian? Here’s a handy countdown timer!
Click that speech bubble to the left, and you’ll be taken directly to the Hack Chat group on Hackaday.io.
You don’t have to wait until Friday; join whenever you want and you can see what the community is talking about.



![The Chrysler gas turbine car from [Brian]'s article. CZmarlin [Public domain].](https://hackaday.com/wp-content/uploads/2017/08/turbine.jpg)
![The Rover Jet1 prototype. Allen Watkin [CC BY-SA 2.0].](https://hackaday.com/wp-content/uploads/2017/11/rover_sort_of-_2398190117.jpg)
![The Rover-BRM racing car at Gaydon. David Merrett [CC BY 2.0].](https://hackaday.com/wp-content/uploads/2017/11/1024px-rover_brm_-_gas_turbine_heritage_motor_centre_gaydon_1.jpg)