If anyone has been struggling to get hold of a 3.5″ floppy drive lately, we think we’ve got a clue as to why — behold, the mighty floppotron 3.0 by [Paweł Zadrożniak.] With an utterly bonkers 512 floppy drives, four flatbed scanners and sixteen hard disks of various sizes, the floppotron 3.0 MIDI synthesiser is possibly the biggest such retro hardware synthesiser so far. Since every part of the system is motor-based, nobody is going to be surprised that to power the show is quite an undertaking, with nearly twenty switched-mode PSU modules needed to keep up with the demand, averaging 300W but rated at 1.2kW peak!
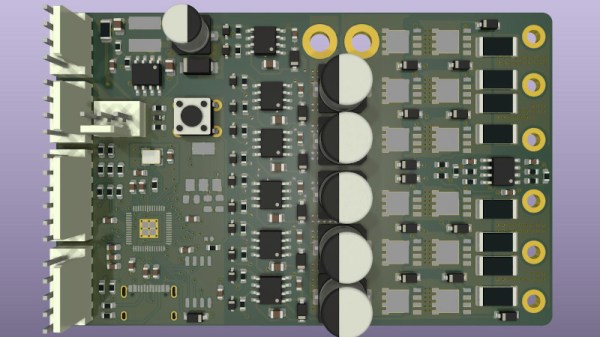
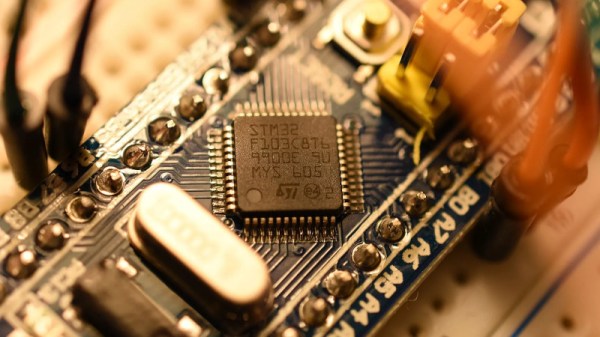
A full custom MIDI-to-RS485 gateway based around the nRF52xx series MCU deals with the communication to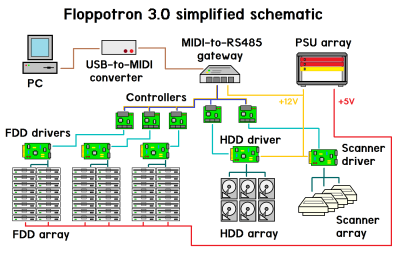 the collection of instrument controllers. These controllers are generic enough to take RS485 input and control a dedicated driver for either an array of floppy drives (up to 192), an array of hard drives or the handful of scanners. The way the floppy drives are grouped is quite neat. Rather than using each drive to generate a specific tone, the software uses the whole column for each note. By varying the number of drives moving simultaneously over time, the sound volume varies, simulating the note envelope and giving a richer sound. Multiple columns driving in parallel give the system a 16-note polyphony. The floppies cover the low notes, with the four flatbed scanners covering the higher notes. MIDI drum sounds are mapped to the hard disks, operating in a, well, percussive manner, with different case shapes giving unique sounds. Even the firmware can be updated over MIDI! So, checkout the demo video after the break for a sweet rendition of the very familiar “Entry of the gladiators” by Czech composer Julius Fučík.
the collection of instrument controllers. These controllers are generic enough to take RS485 input and control a dedicated driver for either an array of floppy drives (up to 192), an array of hard drives or the handful of scanners. The way the floppy drives are grouped is quite neat. Rather than using each drive to generate a specific tone, the software uses the whole column for each note. By varying the number of drives moving simultaneously over time, the sound volume varies, simulating the note envelope and giving a richer sound. Multiple columns driving in parallel give the system a 16-note polyphony. The floppies cover the low notes, with the four flatbed scanners covering the higher notes. MIDI drum sounds are mapped to the hard disks, operating in a, well, percussive manner, with different case shapes giving unique sounds. Even the firmware can be updated over MIDI! So, checkout the demo video after the break for a sweet rendition of the very familiar “Entry of the gladiators” by Czech composer Julius Fučík.
If you think this looks familiar, you’re not mistaken, we’ve covered an earlier floppotron before, but we reckon nobody has attempted to do it with ye olde eight-inch drives yet!