We live in an amazing time where the availability of rapid prototyping tools and expertise to use them has expanded faster than at any other time in human history. We now have an amazing ability to quickly bring together creative solutions — perfect examples of this are the designs for specialized arm prosthetics, Braille printing, and custom wheelchair builds that came together last week.
Earlier this month we published details about the S.T.E.A.M. Fabrikarium program taking place at Maker’s Asylum in Mumbai. The five-day event was designed to match up groups of makers with mentors to build assistive devices which help improve the condition of differently-abled people.
The participants were split into eight teams and they came up with some amazing results at the end of the five-day program.
Hands-On: Prosthetic Designs That Go Beyond
Three teams worked on projects based on Bionico – a myoelectric prosthesis
DIY Prosthetic Socket – a Human Machine Interface : [Mahendra Pitav aka Mahen] lost his left arm during the series of train bomb blasts in Mumbai in 2006, which killed 200 and injured over 700 commuters. He uses a prosthetic arm which is essentially a three-pronged claw that is cable activated using his other good arm. While it is useful, the limited functionality restricted him from doing many simple things. The DIY Prosthetic socket team worked with [Mahen] and [Nico Huchet] from MyHumanKit (who lost his right arm in an accident 16 years back), and fabricated a prosthetic forearm for [Mahen] with a modular, 3D printed accessory socket. Embedded within the arm is a rechargeable power source that provides 5V USB output at the socket end to power the devices that are plugged in. It also provides a second port to help recharge mobile phones. Also embedded in the arm was an IR reflective sensor that can be used to sense muscle movements and help trigger specific functions of add-on circuits, for example servos.



Continue reading “Rapidly Prototyping Prosthetics, Braille, And Wheelchairs”

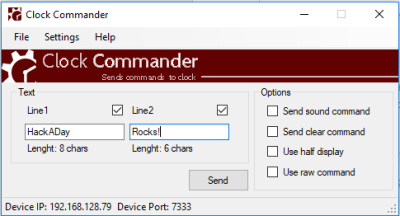 What [limbo] adds to the conventional functionality is a LAN application to send custom messages to the LCD. The software is called ‘Clock Commander’ and can be downloaded as a Windows binary through the source code is unavailable for now. Simply point it to the correct IP address and you can then send it commands to display stuff as well as control the sound. The project comes with Lua scripts and instruction how to DIY.
What [limbo] adds to the conventional functionality is a LAN application to send custom messages to the LCD. The software is called ‘Clock Commander’ and can be downloaded as a Windows binary through the source code is unavailable for now. Simply point it to the correct IP address and you can then send it commands to display stuff as well as control the sound. The project comes with Lua scripts and instruction how to DIY.