Ah, stereotypes. Once they’ve solidified it’s surprisingly hard to shake them. When non-Australians think of a generic Aussie then, the chances are that a Crocodile Dundee type of character will spring to mind — a ‘Strine-speaking outdoorsman with a beer in hand. This group of Aussies aren’t helping the case, with a video posted by Australian drone retailer UAVme and featured by ABC News where a large multirotor lifts a guy in a lawn chair, beer in hand, over a lake to do some fishing.
Antics aside, having enough capacity to lift a person is pretty impressive. The drone in question appears to be a large hexacopter frame with rotors both below and above the boom, achieving an unusual dodecacopter configuration.
Of course we’re entertained by the sight, who wouldn’t envy them a spin under a drone in the relative safety of an environment where an unscheduled landing merely means getting wet? It seems Austrailia’s Civil Aviation Safety Authority isn’t quite so happy though, as ABC reports the usual chorus of condemnation. Entertainingly though it’s unclear whether or not our plucky adventurer — named as [Sam Foreman] — has in fact broken any laws given that he’s not flown in restricted airspace, over people or habitation, or above the legal altitude.
This isn’t the first such story we’ve brought you from Down Under, back in 2016 an Aussie landed in hot water for picking up a Bunnings sausage in a bun with his drone.
Continue reading “Aussies Find The True Meaning Of Drone Flight”



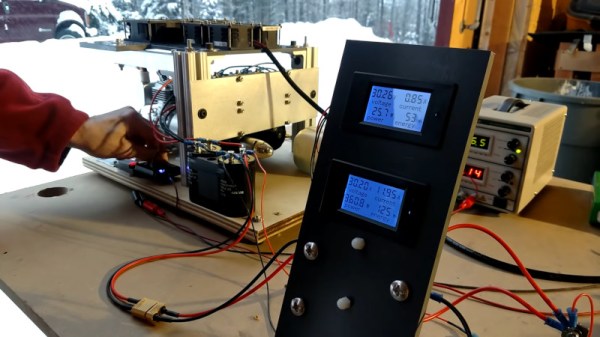
 The drone hardware used by [Ogün Levent] and his team is a custom-made S600 frame with T-Motor U3 motors and a 40 A speed controller, with a takeoff weight of 5 kg. An
The drone hardware used by [Ogün Levent] and his team is a custom-made S600 frame with T-Motor U3 motors and a 40 A speed controller, with a takeoff weight of 5 kg. An 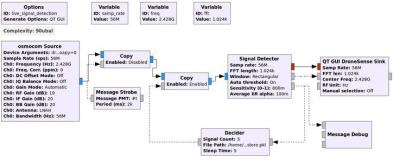 One of the LimeSDRs runs a GNU radio flowgraph with a specially designed block for detecting the rogue drone’s frequency modulation signature with what seems to be a machine learning classification script. The other LimeSDR runs another *secret* flowgraph and a custom script running on the SBC combines the two flowgraphs together.
One of the LimeSDRs runs a GNU radio flowgraph with a specially designed block for detecting the rogue drone’s frequency modulation signature with what seems to be a machine learning classification script. The other LimeSDR runs another *secret* flowgraph and a custom script running on the SBC combines the two flowgraphs together.