Children can do lots of things that robots and computers have trouble with. Climbing stairs, for example, is a tough thing for a robot. Recognizing objects is another area where humans are generally much better than robots. Kids can recognize blocks, shapes, colors, and extrapolate combinations and transformations.
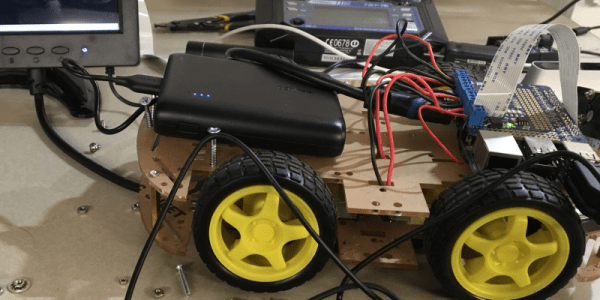
Google’s open-source TensorFlow software can help. It is a machine learning system used in Google’s own speech recognition, search, and other products. It is also used in quite a few non-Google projects. [Lukas Biewald] recently built a robot around some stock pieces (including a Raspberry Pi) and enlisted TensorFlow to allow the robot to recognize objects. You can see a video of the device, below.
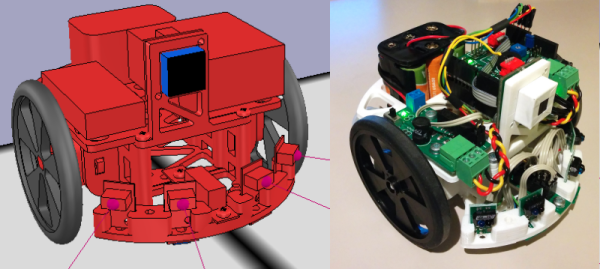
[Nurgak] shows how one can use some of the great robotic tools out there to simulate a robot before you even build it. To drive this point home he builds the tutorial off of the easily 3D printable and buildable Robopoly platform.
The robot runs on Robot Operating System at its core. ROS is interesting because of its decentralized and input/output agnostic messaging system. For example, if you leave everything alone but swap out the motor output from actual motors to a simulator, you can see how the robot would respond to any arbitrary input.
[Nurgak] uses another piece of software called V-REP to demonstrate this. V-REP is a simulation suite for robotics and has a few ROS nodes built in. So in order to make a simulated line-following robot, [Nurgak] tells V-REP to send a simulated camera image to the decision making node of the robot in ROS. It then sends the movement messages back to V-REP which drives the pretend robot around.
He runs through a few more examples, proving that it’s entirely possible to become if not a roboticist, at least a really good AI programmer without ever dropping the big money on parts to build a robot.
At my university, we were all forced to take a class called Engineering 101. Weirdly, we could take it at any point in our careers at the school. So I put it off for more interesting classes until I was forced to take it in one of my final years. It was a mess of a class and never quite seemed to build up to a theme or a message. However, every third class or so they’d dredge up a veritable fossil from their ranks of graduates. These greybeards would sit at the front of the class and tell us about incredible things. It was worth the other two days of nondescript rambling by whichever engineering professor drew the short straw for one of their TAs.
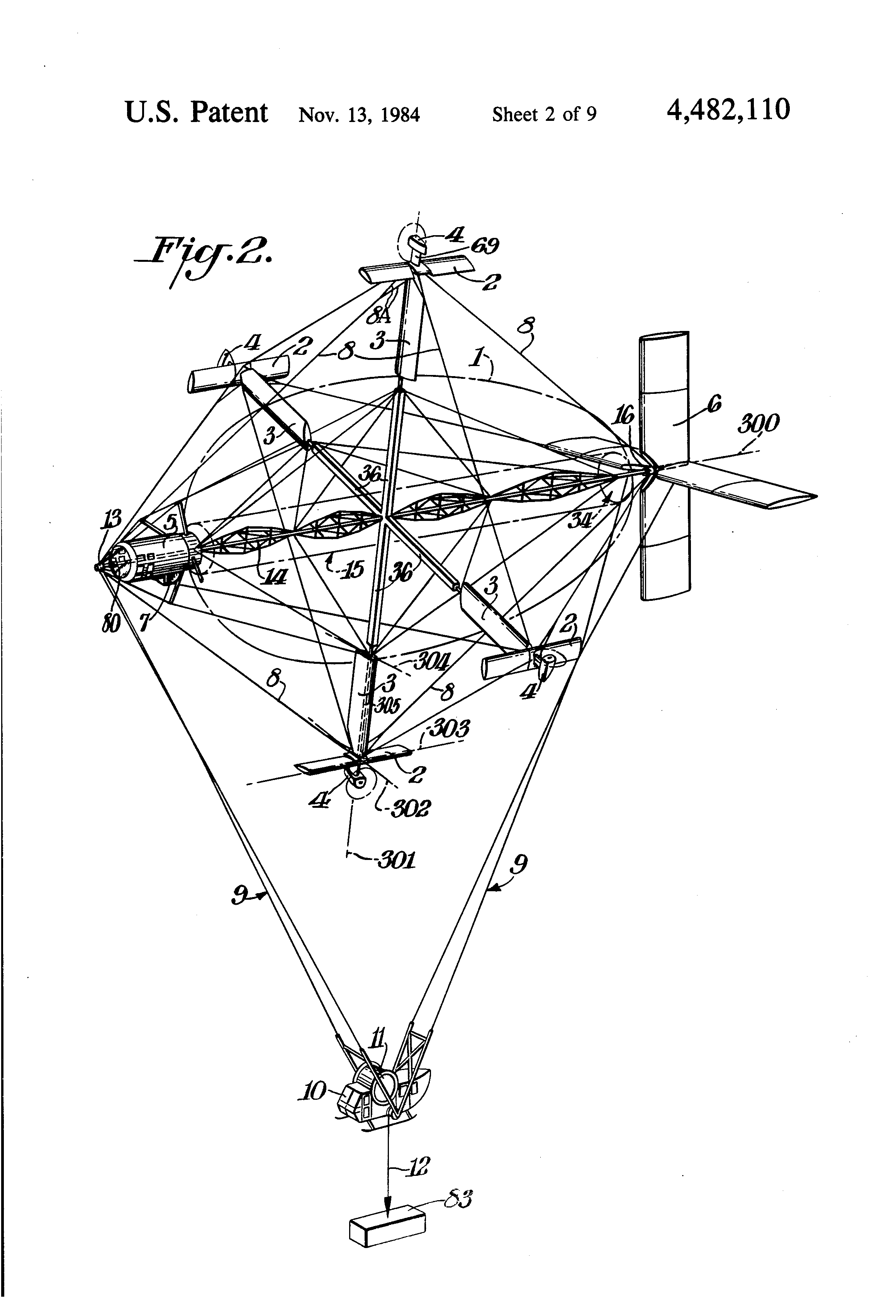
The patent drawing.
One greybeard in particular had a long career in America’s unending string of, “Build cool stuff to help us make bad guys more deader,” projects. He worked on stealth boats, airplanes with wings that flex, and all sorts of incredibly cool stuff. I forgot about the details of those, but the one that stuck with me was the Cyclocrane. It had a ton of issues, and as the final verdict from a DARPA higher-up with a military rank was that it, “looked dumb as shit” (or so the greybeard informed us).
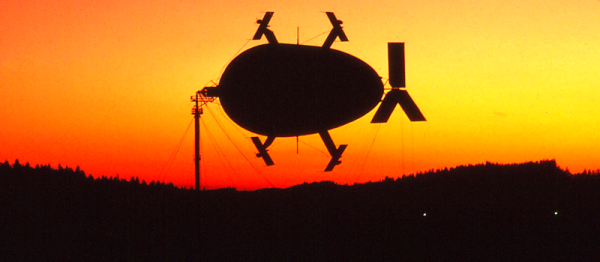
A Cyclo-What?
The Cyclocrane was a hybrid airship. Part aerodynamic and part aerostatic, or more simply put, a big balloon with an airplane glued on. Airships are great because they have a constant static lift, in nearly all cases this is buoyancy from a gas that is lighter than air. The ship doesn’t “weigh” anything, so the only energy that needs to be expended is the energy needed to move it through the air to wherever it needs to go. Airplanes are also great, but need to spend fuel to lift themselves off the ground as well as point in the right direction. Helicopters are cool because they make so much noise that the earth can’t stand to be near them, providing lift. Now, there’s a huge list of pros and cons for each and there’s certainly a reason we use airplanes and not dirigibles for most tasks. The Cyclocrane was designed to fit an interesting use case somewhere in the middle.
In the logging industry they often use helicopters to lift machinery in and out of remote areas. However, lifting two tons with a helicopter is not the most efficient way to go about it. Airplanes are way more efficient but there’s an obvious problem with that. They only reach their peak efficiency at the speed and direction for which their various aerodynamic surfaces have been tuned. Also worth noting that they’re fairly bad at hovering. It’s really hard to lift a basket of chainsaws out of the woods safely when the vehicle doing it is moving at 120mph.
The cyclocrane wanted all the efficiency of a dirigible with the maneuverability of a helicopter. It wanted to be able to use the effective lifting design of an airplane wing too. It wanted to have and eat three cakes. It nearly did.
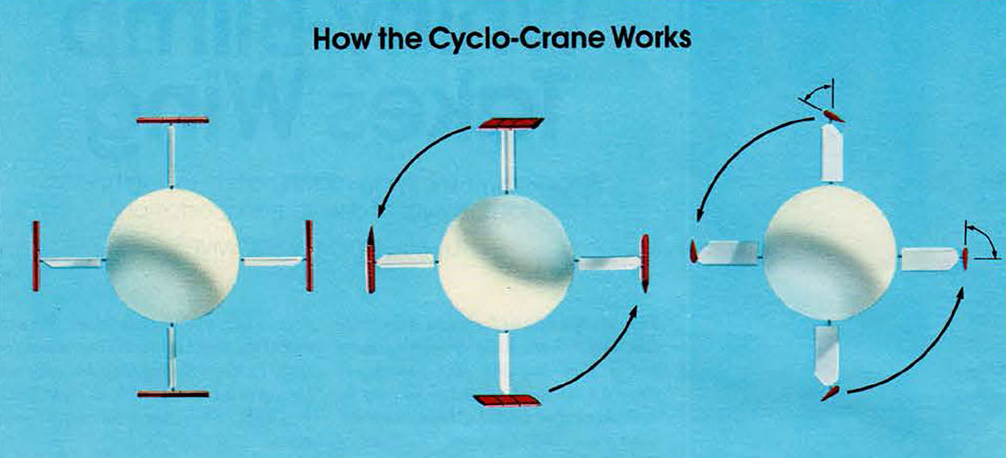
A Spinning Balloon with Wings
Four wings stick out of a rotating balloon. The balloon provides half of the aerostatic lift needed to hold the plane and the cargo up in the air. The weight is tied to the static ends of the balloon and hang via cables below the construction. The clever part is the four equidistant wings sticking out at right angles from the center of the ship. At the tip of each wing is a construction made up of a propellor and a second wing. Using this array of aerofoils and engines it was possible for the cyclocrane to spin its core at 13 revolutions per minute. This produced an airspeed of 60 mph for the wings. Which resulted in a ton of lift when the wings were angled back and forth in a cyclical pattern. All the while, the ship remaining perfectly stationary.
Now the ship had lots of problems. It was too heavy. It needed bigger engines. It was slow. It looked goofy. It didn’t like strong winds. The biggest problem was a lack of funding. It’s possible that the cyclocrane could have changed a few industries if its designers had been able to keep testing it. In the end it had a mere seven hours of flying time logged with its only commercial contract before the money was gone.
However! There may be some opportunity for hackers here. If you want to make the quadcopter nerds feel a slight sting of jealousy, a cyclocrane is the project for you. A heavy lift robot that’s potentially more efficient than a balloon with fans on it is pretty neat. There’s a bit of reverse engineering to be done before a true performance statement can be made. If nothing else. It’s just a cool piece of aerospace history that reminds us of the comforting fact that we haven’t even come close to inventing it all yet.
If you’d like to learn more there’s a ton of information and pictures on one of the engineer’s website. Naturally wikipedia has a bit to say. There’s also decent documentary on youtube, viewable below.
Amazon has unveiled the Alexa Prize, a $2.5 Million purse for the first team to turn Alexa, the voice service that powers the Amazon Echo, into a ‘socialbot’ capable of, “conversing coherently and engagingly with humans on popular topics for 20 minutes”.
The Alexa Prize is only open to teams from colleges or universities, with the winning team taking home $500,000 USD, with $1M awarded to the team’s college or university in the form of a research grant. Of course, the Alexa Prize grants Amazon a perpetual, irrevocable, worldwide, royalty-free license to make use of the winning socialbot.
It may be argued the Alexa Prize is a competition to have a chat bot pass a Turning Test. This is a false equivalency; the Turing Test, as originally formulated, requires a human evaluator to judge between two conversation partners, one of which is a human, one of which is a computer. Additionally, the method of communication is text-only, whereas the Alexa Prize will make use of Alexa’s Text to Speech functionality. The Alexa Prize is not a Turing Test, but only because of semantics. If you generalize the phrase, ‘Turing Test’ to mean a test of natural language conversation, the Alexa Prize is a Turing Test.
This is not the first prize offered for a computer program that is able to communicate with a human in real time using natural language. Since 1990, the Loebner Prize, cosponsored by AI god Marvin Minsky, has offered a cash prize of $100,000 (and a gold medal) to the first computer that is indistinguishable from a human in conversation. Since 1991, yearly prizes have been awarded to the computer that is most like a human as part of the competition.
For any team attempting the enormous task of developing a theory of mind and consciousness, here are a few tips: don’t use Twitter as a dataset. Microsoft tried that, and their chatbot predictably turned racist. A better idea would be to copy Hackaday and our article-generating algorithm. Just use Markov chains and raspberry pi your way to arduino this drone.
There’s hardly a day that passes without an Arduino project that spurs the usual salvo of comments. Half the commenters will complain that the project didn’t need an Arduino. The other half will insist that the project would be better served with a much larger computer ranging from an ARM CPU to a Cray.
[Will Moore] has been interested in BEAM robotics — robots with analog hardware instead of microcontollers. His latest project is a sophisticated line follower. You’ve probably seen “bang-bang” line followers that just use a photocell to turn the robot one way or the other. [Will’s] uses a hardware PID (proportional integral derivative) controller. You can see a video of the result below.
Check out the great workmanship that went into [TonyRobot]’s coffee vending version of ROBOT CAFE at Tokyo Maker Faire 2016. We’d really like to see this in action, so if anyone has more success than we did at tracking down more info (especially if it’s video) let us know in the comments below. We spot laser-cut wood making up the clever scoop design (and the numerous gears within it) but simply must know more.
Technically this is less “robot” and more “automata“. The cart charmingly fuses vending machine practicality with a visual display… and a great one at that. The aesthetic of the Robot Cafe leaps over the uncanny valley and fully embraces lovable robot faces.
Coffee is ground by a manual-style grinder into a scoop, which is then dumped into a pour-over filter. The hot water is then raised from below to pour over the grounds. These characters can be reconfigured based on the needs of the venue. The creator page linked above has three pictures of the same cart and same robo-baristas, but they are fishing for sodas instead. The glass bottles are lifted through the hole you can see on the right of the cart’s counter, using a fishing line with a magnet to grip the metal bottle cap.