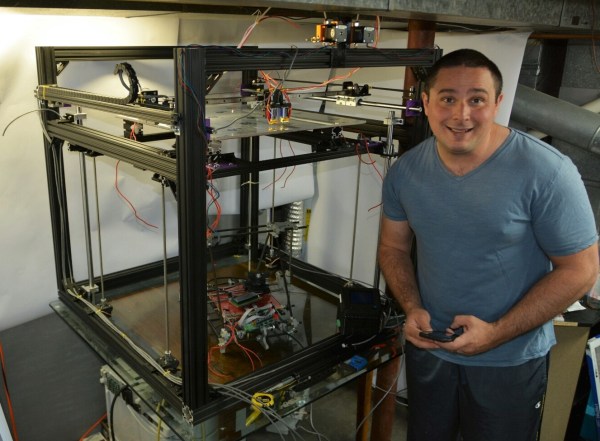
When we wrote about [Dan Beaven]’s resin printer a while back he enthusiastically ensured us that, thanks to the recent wave of attention, he would finally finish the project. That’s why today we are covering his entirely unrelated 2 cubic foot print volume FDM printer.
As we mentioned, [Dan] is no stranger to 3D printers. His addiction has progressed so far that he needs bigger and bigger parts, but when he looked at the price of printers that could sate his thirst… it wasn’t good. We assume this is the time he decided to leverage his resin printer procrastination to build a massive printer for himself.
The frame is aluminum extrusion. The bed is an 1/4″ thick aluminum plate supported just a little bit in from each corner. He can use the 4 motors to level the platform, which is a killer feature on a machine this big. More or less it’s fairly standard mechanically.
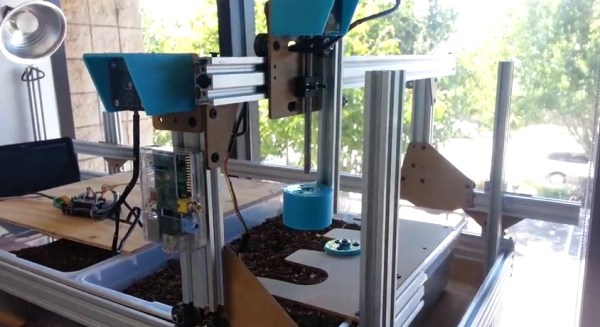
We are interested in his interesting addition of a FLIR thermal sensor to see live heat distribution. We also applaud him on his redundant safety systems (such as a smoke sensor that’s separately powered from the machine).
All the files are available on his site if you’re procrastinating on something and would like one for yourself.

 The project featured in this post is
The project featured in this post is 










