When a part on a vehicle fails, oftentimes the response is to fit a new one fresh out the box. However, sometimes, whether by necessity or simply for the love of it, it’s possible to handcraft a solution instead. [Samodel] does just that when whipping up a new exhaust for his scooter out of scrap metal.
It’s a great example of classic backyard metalworking techniques. The flange is recreated using a cardboard template rubbed on the exhaust port, with the residual oil leaving a clear impression. Hard work with a grinder and drill get things started, with an insane amount of filing to finish the piece off nicely. A properly tuned pipe is then sketched out on the computer, and a paper template created. These templates are cut out of an old fridge to create the main muffler section.
There’s plenty of other hacks, too – from quick and dirty pipe bends to handy sheet forming techniques. It’s not the first time we’ve seen great metalworking with scrap material, either. Video after the break.
Sometimes, mechanical parts can be supremely expensive, or totally unavailable. In those cases, there’s just one option — make it yourself. It was this very situation in which I found myself. My electric scooter had been ever so slightly bested by a faster competitor, and I needed redemption. A gearing change would do the trick, but alas, the chain sprocket I needed simply did not exist from the usual online classifieds.
Thus, I grabbed the only tools I had, busied myself with my task. This is a build that should be replicable by anyone comfortable using a printer, power drill, and rotary tool. Let’s get to work!
The last few years have seen a huge rise in the prominence of electric scooters. Brushless motors, lithium batteries, and scooter sharing companies have brought them to the mainstream. However, electric scooters of a variety of designs have been around for a long time, spawning a dedicated subculture of hackers intent on getting the best out of them.
One such hacker is yours truly, having started by modifying basic kick scooters with a variety of propulsion systems way back in 2009. After growing frustrated with the limitations of creating high-speed rotating assemblies without machine tools, I turned my eye to what was commercially available. With my first engineering paycheck under my belt, I bought myself a Razor E300, and was promptly disappointed by the performance. Naturally, hacking ensued as the lead-acid batteries were jettisoned for lithium replacements.
Over the years, batteries, controllers and even the big old heavy brushed motor were replaced. The basic mechanical layout was sound, making it easy to make changes with simple hand tools. As acceleration became violent and top speeds inched closer to 40 km/h, I began to grow increasingly frustrated with the scooter’s one glaring major flaw. It was time to fix the brakes.
Like many mechanically inclined parents, [Tony Goacher] prefers building over buying. So when his son wanted an electric scooter, his first stop wasn’t to the toy store, but to AliExpress for a 48V hub motor kit. Little did he know that the journey to getting that scooter road-ready would be a bit more involved than he originally bargained for.
She cannae take anymore, Captain
Of course, to build a motorized scooter you need a scooter to begin with. So in addition to the imported motor, [Tony] picked up a cheap kick scooter on eBay. Rather than worrying about the intricacies of cleanly integrating the two halves of the equation, he decided to build a stand-alone module that contained all of the electronics. To attach it to the scooter, he’d cut off the rear wheel and literally bolt his module to the deck.
[Tony] goes into considerable detail on how he designed and manufactured his power unit, from prototyping with laser cut MDF to the final assembly of the aluminum parts that he produced on a CNC of his own design. It’s really a fantastic look at how to go from idea to functional device, with all the highs and lows in between. When the first attempt at mounting the battery ended up cutting into the 8 Ah LiPo pack for example, and treated his son to a bit of a light show.
With all the bugs worked out and his son happily motoring around the neighborhood, [Tony] thought his job was done. Unfortunately, it was not to be. It turned out that his bolt-on power unit had so much kick that it sheared the front wheel right off. Realizing the little fellow didn’t have the fortitude for such electrified exploits, he went to a local shop and got a much better (and naturally much more expensive) donor for the project.
It’s here that his modular approach to the problem really paid off. Rather than having to redesign a whole new motor mount for the different scooter, he just lopped the back wheel off and bolted it on just as he did with the cheapo model. What could easily have been a ground-up redesign turned out to be a few minutes worth of work. Ultimately he did end up machining a new front axle for the scooter so he could fit a better wheel, but that’s another story.
Cue up the [Christopher Walken] memes, it’s time for moped turn signals with more cowbell. Because moped turn signals with less cowbell are clearly the inferior among moped turn signals.
It seems that [Joel Creates] suffers from the same rhythm recognition disorder that we do. The slightest similarity between a rhythmic sound such as turn signals, and any song in our seemingly infinite intracranial playlist cues up that song for the rest of the day. [Joel] heard “(Don’t Fear) The Reaper” in his turn signals, and that naturally led to a need for More Cowbell. So with a car door lock actuator, a relay, an improvised clapper, and a lot of hot glue and cable ties, the front of his scooter is now adorned with a cowbell that’s synchronized to the turn signals. The video below shows that it’s of somewhat limited appeal in traffic, but at least [Joel’s dad] was tickled pink by it.
Kudos to [Joel] for marching to the beat of his own [Gene Frenkle] on this one. It may be a little weird, but not as weird as an Internet of Cowbells.
[Adam Zeloof] (legally) obtained a retired electric scooter and documented how it worked and how he got it working again. The scooter had a past life as a pay-to-ride electric vehicle and “$1 TO START” is still visible on the grip tape. It could be paid for and unlocked with a smartphone app, but [Adam] wasn’t interested in doing that just to ride his new scooter.
His report includes lots of teardown photos, as well as a rundown of how the whole thing works. Most of the important parts are in the steering column and handlebars. These house the battery, electronic speed controller (ESC), and charging circuitry. The green box attached to the front houses a board that [Adam] determined runs Android and is responsible for network connectivity over the cellular network.
To get the scooter running again, [Adam] and his brother [Sam] considered reverse-engineering the communications between the network box and the scooter’s controller, but in the end opted to simply replace the necessary parts with ones under their direct control. One ESC, charger, and cheap battery monitor later the scooter had all it needed to ride again. With parts for a wide variety of electric scooters readily available online, there was really no need to reverse-engineer anything.
The motors in these things are housed within the wheels, and have frankly outstanding price-to-torque ratios. We’ve seen them mated to open-source controllers and explored for use in robotics.
Beyond pride, the biggest issue keeping adults off small motorized scooters is the fact that their tiny motors usually don’t have the power to move anything heavier than your average eighth grader. That didn’t stop [The_Didlyest] from snapping up this $7 thrift store find, but it did mean the hot pink scooter would need to be beefed up if it had any hope of moving 170 lbs of hacker.
Logically, the first step was fitting a more capable motor. [The_Didlyest] used an electric wheelchair motor which had a similar enough diameter that mounting it was fairly straightforward. The original sprocket and chain are still used, as are the mounting holes in the frame (though they had to be tapped to a larger size). That said, the new motor is considerably longer than its predecessor so some frame metal had to be cut away. This left the scooter without a kickstand and with a few inches of motor hanging out of its left side, but it’s all in the name of progress.
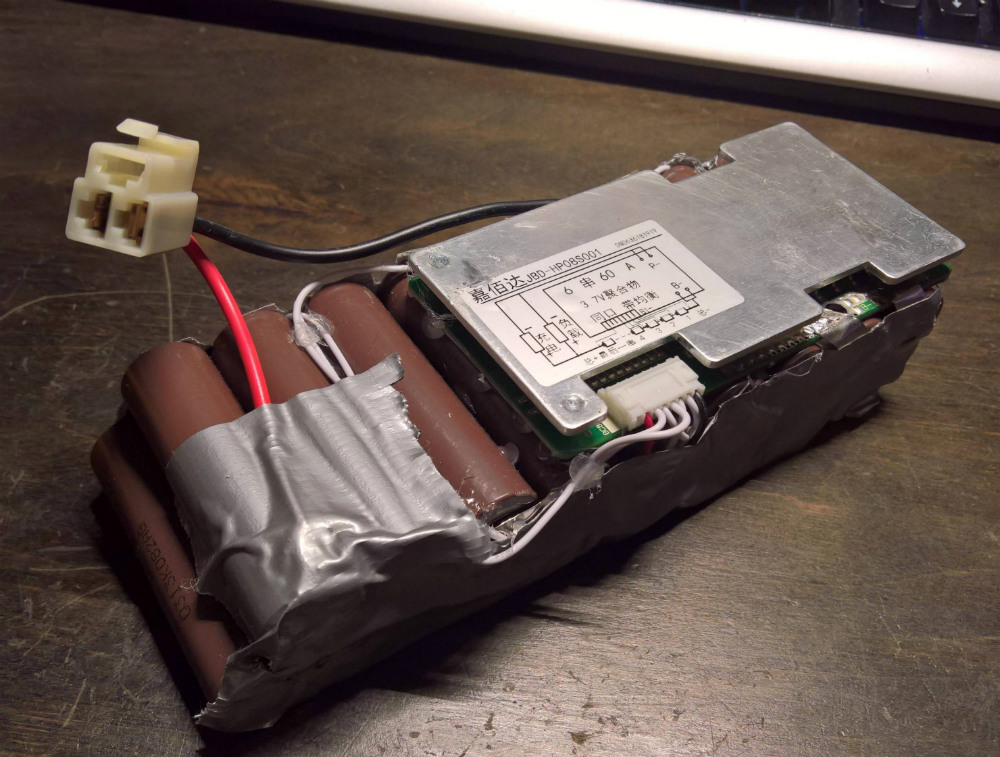
Naturally the upgraded motor needed similarly upgraded batteries to power it, so [The_Didlyest] put together a custom pack using eighteen 18650 cells spot welded together for a total output of 25V. Coupled with a 60A battery management system (BMS), the final 6S 3P configured pack is a very professional little unit, though the liberal application of duct tape keeps it from getting too full of itself.
Unfortunately the original motor controller consisted of nothing but relays, and didn’t allow adjusting speed. So that needed to go as well. In its place is a homebrew speed controller made with three parallel MOSFETs and an Arduino to read the analog value from the throttle and convert that into a PWM signal.
[The_Didlyest] says the rear tire is now in need of an upgrade to transmit all this new power to the road, and some gearing might be in order, but otherwise the scooter rebuild was a complete success. Capable of mastering hills and with a top speed of about 10 MPH, the performance is certainly better than the stock hardware.