Underwater exploration and research can be exceedingly dangerous, which is why remotely operated vehicles (ROVs) are so commonly used. Operators can remotely command these small submersibles to capture images or collect samples at depths which would otherwise be unreachable. Unfortunately, such technology comes at a considerable price.
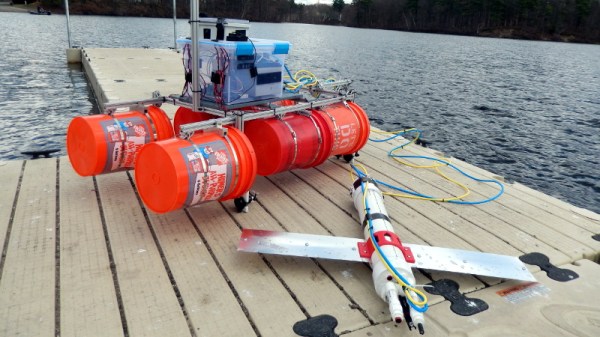
Believing that the high cost of commercial ROVs is a hindrance to aquatic conservation efforts, [Noeël Moeskops] has been developing an open source modular ROV he calls Aruna. Constructed largely from off-the-shelf components and 3D-printed parts, the Aruna promises to be far more affordable than anything currently on the market. Hopefully cheap enough to allow local governments and even citizens to conduct their own underwater research and observations.
More than just the ROV itself, Aruna represents an entire system for developing modular underwater vehicles. Whether you decide to build the boilerplate ROV documented and tested by [Noeël], or implement individual components into your own design, the project is a valuable source of hardware and software information for anyone interested in DIY underwater robotics.
Continue reading “Aruna: An Open Source ROV For Affordable Research”