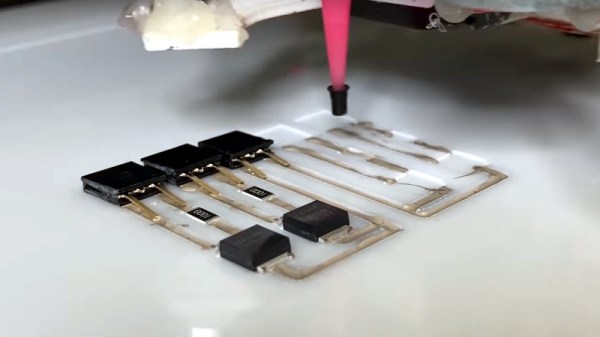
MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) wants to convert laser cutters into something more. By attaching a head to a commercial laser cutter and adding software, they combine the functions of a cutter, a conductive printer, and a pick and place system. The idea is to enable construction of entire devices such as robots and drones.
The concept, called LaserFactory, sounds like a Star Trek-style replicator, but it doesn’t create things like circuit elements and motors. It simply picks them up, places them, and connects them using silver conductive ink. You can get a good idea of how it works by watching the video below.
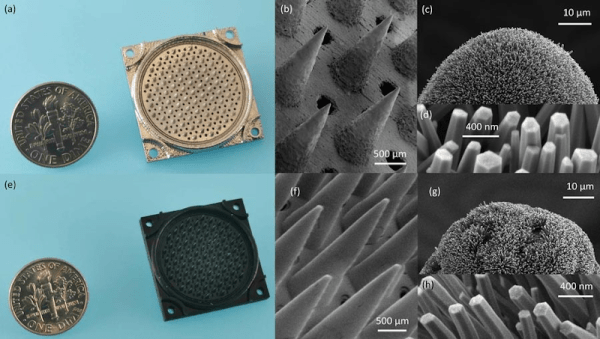
As much as we love Star Trek, we have to admit there are some continuity problems. For example, in Spock’s Brain, the alien-of-the-week’s ion drive gave Scotty engineering envy. However, in The Menagerie, the computer identifies a Starfleet shuttlecraft as having ion propulsion. Either way, ion propulsion is real and NASA has toyed with it for ages and many satellites use it for maintaining orbit. Now researchers from MIT and the Monterrey Institute of Technology and Higher Studies 3D printed tiny ion engines.
The engine is about the size of a dime and, like all ion engines, produces tiny amounts of thrust. In fact, the researchers liken it to half the weight of one sesame seed from a hamburger bun. However, in space, these tiny thrusts add up and over time can produce significant acceleration.
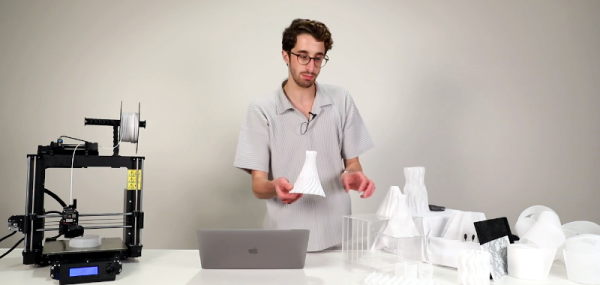
Normally, a 3D printer that under extrudes is a bad thing. However, MIT has figured out a way to deliberately mix full extrusions with under extruded layers to print structures that behave more like cloth than normal 3D printed items. The mesh-like structure apparently doesn’t require any modification to a normal 3D printer, just different software to create special code sequences to create the material.
Called DefeXtiles, [Jack Forman] is producing sheets and complex structures that appear woven. The process is known as “blob-stretch” because of the way the plastic makes blobs connected by fine filaments of plastic.
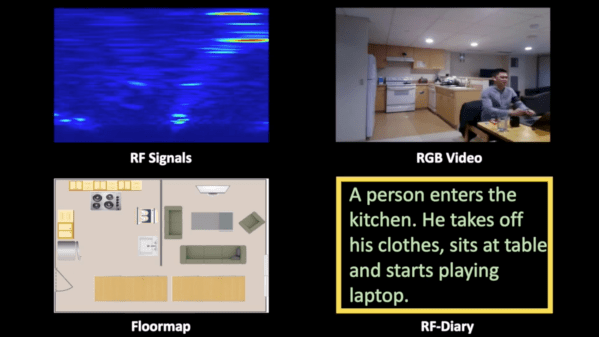
Caring for the elderly and vulnerable people while preserving their privacy and independence is a challenging proposition. Reaching a panic button or calling for help may not be possible in an emergency, but constant supervision or camera surveillance is often neither practical nor considerate. Researchers from MIT CSAIL have been working on this problem for a few years and have come up with a possible solution called RF Diary. Using RF signals, a floor plan, and machine learning it can recognize activities and emergencies, through obstacles and in the dark. If this sounds familiar, it’s because it builds on previous research by CSAIL.
The RF system used is effectively frequency-modulated continuous-wave (FMCW) radar, which sweeps across the 5.4-7.2 GHz RF spectrum. The limited resolution of the RF system does not allow for the recognition of most objects, so a floor plan gives information on the size and location of specific features like rooms, beds, tables, sinks, etc. This information helps the machine learning model recognize activities within the context of the surroundings. Effectively training an activity captioning model requires thousands of training examples, which is currently not available for RF radar. However, there are massive video data sets available, so researchers employed a “multi-modal feature alignment training strategy” which allowed them to use video data sets to refine their RF activity captioning model.
There are still some privacy concerns with this solution, but the researchers did propose some improvements. One interesting idea is for the monitored person to give an “activation” signal by performing a specified set of activities in sequence.
There is more than one way to lead a successful life. Some people have all the opportunity in the world laid out before them, and it never does them any good. Others have little more than the determination and desire they’ve dredged up within themselves, and that grit turns out to be the abrasive that smooths the path ahead.
Ronald McNair succeeded despite poverty, racism, and an education system designed to keep Black people down. He became an accidental revolutionary at the age of nine, when he broke the color barrier in his small South Carolina town via the public library. This act of defiance in pursuit of education would set the course for his relatively short but full life, which culminated in his career as a Space Shuttle mission specialist.
Rule-Breaker with a Slide Rule
Ronald McNair was born October 21, 1950 in Lake City, South Carolina, the second of three sons, to Pearl and Carl McNair. His mother was a teacher, and encouraged his love of reading. Ronald’s father, Carl was an auto mechanic who never finished high school and always regretted it. Though the family was poor, Ron grew up surrounded by books, music, and support.
3D printers have become a staple in most makerspaces these days, enabling hackers to rapidly produce simple mechanical prototypes without the need for a dedicated machine shop. We’ve seen many creative 3D designs here on Hackaday and [jegatheesan.soundarapandian’s] Baby MIT Cheetah Robot is no exception. You’ve undoubtedly seen MIT’s cheetah robot. Well, [jegatheesan’s] hack takes a personal spin on the cheetah robot and his results are pretty cool.
The body of the robot is 3D printed making it easy to customize the design and replace broken parts as you go. The legs are designed in a five-bar linkage with two servo motors controlling each of the four legs. An additional servo motor is used to rotate an HC-SR04, a popular ultrasonic distance sensor, used in the autonomous mode’s obstacle avoidance mechanism. The robot can also be controlled over Bluetooth using an app [jegatheesan] developed in MIT App Inventor.
Overall, the mechanics could use a bit of work — [jegatheesan’s] baby cheetah probably won’t outpace MIT’s robot any time soon — but it’s a cool hack and we’re looking forward to a version 3. Maybe the cheetah would make a cool companion bot?
The MIT Media Lab’s Open Agriculture Initiative (OpenAg) promised to revolutionize urban farming with their Food Computers: essentially miniature automated gardens that could be installed in racks to maximize growing space. Each unit would be provided with a “Recipe” that allowed it to maintain the ideal environmental conditions for the species it contained, which meant that even the novice gardener to produce a bumper crop no whether they lived in the Arctic Circle or the Sahara.
With such lofty goals, success certainly wasn’t assured. But we still didn’t expect to hear that the program had to be permanently closed after a string of startling accusations came to light. From engaging in scientific dishonesty to setting off a minor ecological disaster, the story just gets worse and worse. Who could have imagined that one day we’d have to report on an open source project having direct ties to Jeffrey Epstein?
Food Computer v3.0
According to reports, MIT Media Lab Director Joichi Ito and OpenAg principal researcher Caleb Harper attempted to secure $1.5 million in funding for the program during a 2017 meeting with the disgraced financier. Epstein apparently wasn’t impressed by what he saw, and no money ever changed hands. Given the information we now have about the project, this might actually be the least surprising part of the story.
It has since come to light that the Food Computers never worked consistently, and indeed never made it past the prototype stage. This despite the fact that Harper claimed that functional units had already been deployed to refugee camps during presentation to potential investors. A scientist working with the project has even come forward with claims that staff were instructed to place plants brought from local garden centers into the prototype Food Computers prior to tours of the lab so visitors would think they had been grown in the devices.
A former researcher working on the OpenAg program, Babak Babakinejad, also went public with his concerns over the environmental impact of dumping waste water from the Food Computers. The lab had a permit to pump nitrogen-infused water into an underground disposal well, but according to Babakinejad, internal testing showed the nitrogen levels in the water would occasionally top 20 times the stated limit. After his concerns were ignored by Harper and other MIT staff, he eventually took his concerns directly to the Massachusetts Department of Environmental Protection which led to an investigation and ultimately a fine of $25K.
We first covered the Open Agriculture Initiative back in 2016, and readers expressed doubts about the concept even then. While we certainly don’t relish making an update like this about a project we’ve featured, it’s an important reminder that honesty and integrity can’t take a backseat to technical achievement.