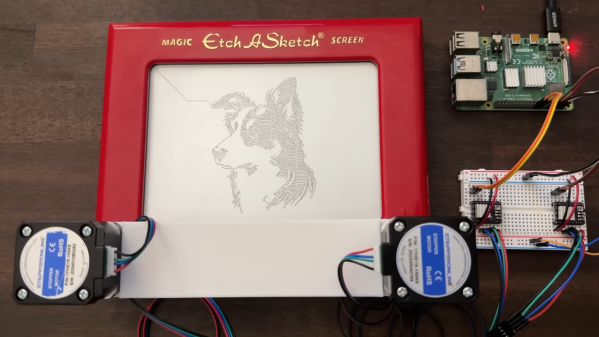
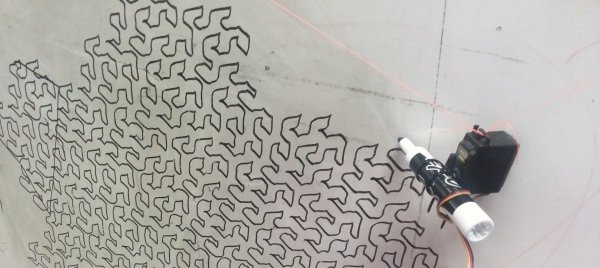
The Etch-a-Sketch was a popular toy, but a polarizing one. You were either one of those kids that had the knack, or one of the kids that didn’t. [Micah] was pretty firmly in the latter group, so decided to roboticize the Etch-a-Sketch so a computer could draw for him instead.
The build uses a pair of stepper motors attached to the Etch-a-Sketch’s knobs via 3D-printed adapters. It took [Micah] a few revisions to get the right design and the right motors for the job, but it all came together. A Raspberry Pi is charged with driving the motors to draw the desired picture.
Beyond the mechanics, [Micah] also does a great job of explaining the challenges around drawing and the drive software. Namely, the Etch-a-Sketch has a major limitation in that there’s no way to move the stylus without drawing a line. He accounts for this in his code for converting and drawing images.
The robot draws slowly but surely. The final result is incredibly impressive, and far exceeds what most of us could achieve on by hand. We’ve seen some similar builds in the past, too. Video after the break.
Last week we briefly mentioned a vulnerability in the Papercut software, and more details and a proof of concept have been published. The vulnerability is one known as session puzzling. That’s essentially where a session variable is used for multiple purposes, or gets incorrectly set. In Papercut, it was possible to trigger the SetupCompleted class on a server that had already finished that initial setup process. And part of SetupCompleted validated the session of the current user. In a normal first-setup case, that might make sense, but as anyone could trigger that code, it allowed anonymous users to jump straight to admin.
The other half of the exploit leverages the “print script” feature, which lets admins write code that runs on printing. A simple java.lang.Runtime.getRuntime().exec('calc.exe'); does the trick to jump from web interface to remote code execution. The indicators of compromise are reasonable generic, including User "admin" logged into the administration interface. and Admin user "admin" modified the print script on printer "".. A Shodan search turns up around 1,700 Papercut servers accessible from the Internet, which prompts the painfully obvious observation that your internal print auditing solution’s web interface definitely should not be exposed online.
Apache Superset
Superset is a nifty data visualization tool for showing charts, graphs, and all sorts of pretty data sets on a dashboard. It also has some weirdness with using web sessions for user management. The session is stored on the user side in a cookie, signed with a secret key. This works great, unless the key used is particularly weak. And guess what, the default configuration of Superset uses a pre-populated secret key. thisismysecretkey is arguably a bad key to start with, but it turns out it’s also shared by more than 70% of the accessible Superset servers.
Ebikes are slowly taking the place of many cars, especially for short trips. Most ebikes can take riders at least 16 kilometers (10 miles) without too much effort, at a cost that’s often a single-digit percentage of what the same trip would have been with an internal combustion engine. If you’re interested in dropping the costs of your ebike trips even further, or eliminating it entirely, take a look at this small ebike with integrated solar panels.
While any battery can be charged with a sufficiently large array of solar panels and the correct electronics to match the two systems together, this bike has a key that sets it apart from most others: it can charge while it is being used to power the bike. Most ebikes don’t have charging enabled during rides, so if you want to use the sun while riding to extend the range of the bike you’ll need to find one like this. This bike uses two 50 W panels on the two cargo areas of the bike, attached to a 400 W MPPT charge controller. The Lectric XP 2.0 ebike has a motor with a peak rating of 850 W, but in a low pedal-assist mode the solar panels likely output a significant fraction of the energy used by the electric drivetrain.
Even if the panels don’t provide the full amount of energy needed for riding around, the project’s creator [Micah] lives in Florida, so just setting the bike outside in the sun for six to eight hours is enough to replenish most of the battery’s charge. It’s probably not going to win any solar-powered bike races anytime soon, but for an efficient, quick bike to ride around town it’s not too shabby.
Here at Hackaday, we’re always working as hard as we can to bring you the latest and most exciting technologies, and like so many people we’ve become convinced that the possibilities offered by the rise of the Blockchain present unrivaled opportunities for humanity to reinvent itself unfettered by the stifling regulations of a dying system. This is why today we’ve decided to join in with the digital cognoscenti and celebrities embracing Non-Fungible Tokens, or NFTs, as a new promise of non-corporeal digital investment cryptoasset that’s taking the world by storm.
Crypto Non-Fungible Investment Gains!
Imagine for a minute, yourself owning a very expensive car. Skievl, CC BY-SA 4.0.
An NFT is a digital token representing something in the real world, and coupled to a unique ID held in a secure entry in the Blockchain. It’s non-fungible, which means that it’s unique and not interchangeable in the manner of a traditional old-style cryptoasset such as Bitcoin. As it allows a real-world object to be tokenised in digital form it represents a way to own something that provides an irrefutable connection to it as as a digital cryptoasset.
It’s a complex system that’s maybe too difficult to explain fully in a single article, but think of an NFT as a way to invest in a cryptoasset in digital form with its uniqueness guaranteed by Blockchain security, without having the inconvenience of physically owning it. Instead your NFT is safely held on a server on the Internet, and can’t be physically stolen as it would from a bank vault because it has the Blockchain cryptosecurity baked in.
Non Fungible Blockchain Cryptoassets!
You don’t own this. Yet.
NFTs have so far found a space in the creative markets, where they have provided a revolutionary opportunity for artists to expand their sales in the digital realm by selling NFTs of their work. A struggling artist can now access buyers all over the world, who can in turn now invest with confidence in creative talent to which they would never otherwise be exposed. It’s a win-win situation in which both cryptoinvestor and artist benefit from The Power of the Blockchain.
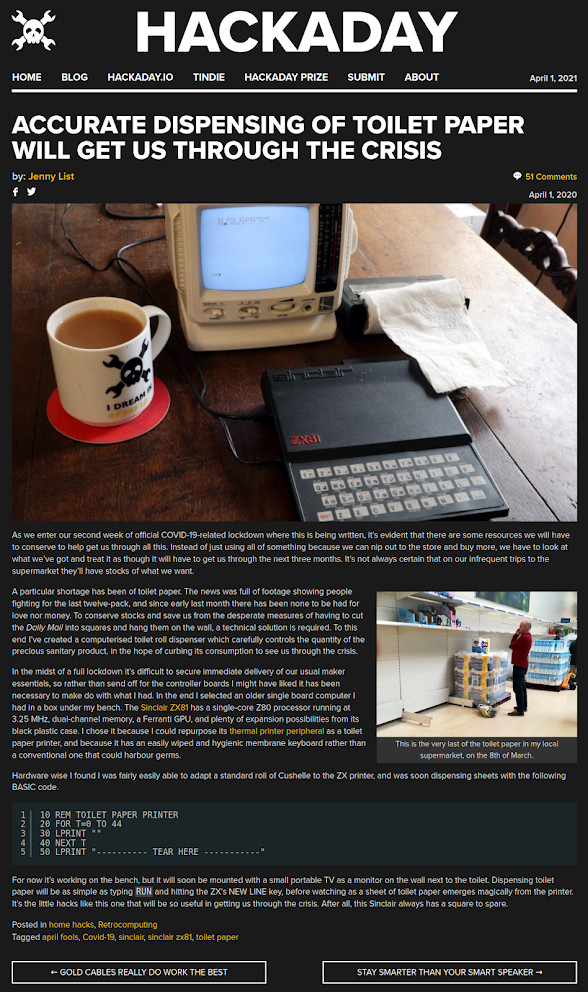
Hackaday is excited to offer a once-in-a-lifetime chance to acquire a Blockchain-cryptosecured NFT representing one of our own articles; our first ever NFT is the only officially sanctioned digital copy of a Hackaday article presenting a novel method of handling toilet paper shortages. The original article will continue to exist on Hackaday.com with all rights reserved, but we will not make any other NFTs of it. We may also decide to update the original article to let everyone know you are the lucky owner of the only digital copy of this piece of greatness. That’s right, this NFT will let you prove you own a screenshot!
Having today sold you on the incredible cryptoinvestment opportunity offered by NFTs, we’ll be back on another date with a more sober and in-depth technical examination of the technology behind them. Meanwhile should our brief foray into NFTs garner any interest (and we really hope it does not), we will donate proceeds to the excellent Girls Who Code, a truly solid investment with a tangible bright future.
Thanks [Micah Scott] for some NFT consultancy during the making of this piece.
Figuring out the maximum number of peripherals which can be sensed or controlled with a minimum number of IOs is a classic optimization trap with a lot of viable solutions. The easiest might be something like an i2c IO expander, which would give you N outputs for 4 wires (SDA, SCL, Power, Ground). IO expanders are easy to interface with and not too expensive, but that ruins the fun. This is Hackaday, not optimal-cost-saving-engineer-aday! Accordingly there are myriad schemes for using high impedance modes, the directionality of diodes, analog RCs, and more to accomplish the same thing with maximum cleverness and minimum part cost. Tucoplexing is the newest variant we’ve seen, proven out by the the prolific [Micah Elizabeth Scott] (AKA [scanlime]) and not the first thing to be named after her cat Tuco.
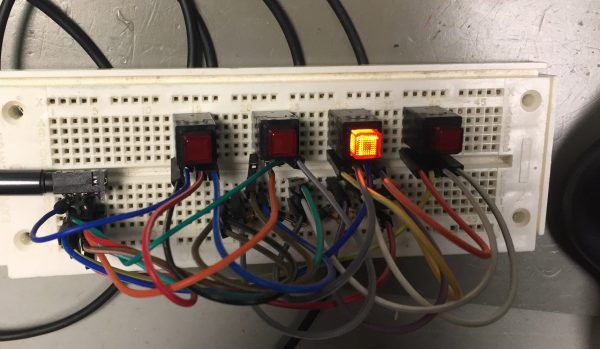
[Micah’s] original problem was that she had a great 4 port USB switch with a crummy one button interface. Forget replacement; the hacker’s solution was to reverse and reprogram the micro to build a new interface that was easier to relocate on the workbench. Given limited IO the Tucoplex delivers 4 individually controllable LEDs and 4 buttons by mixing together a couple different concepts in a new way.
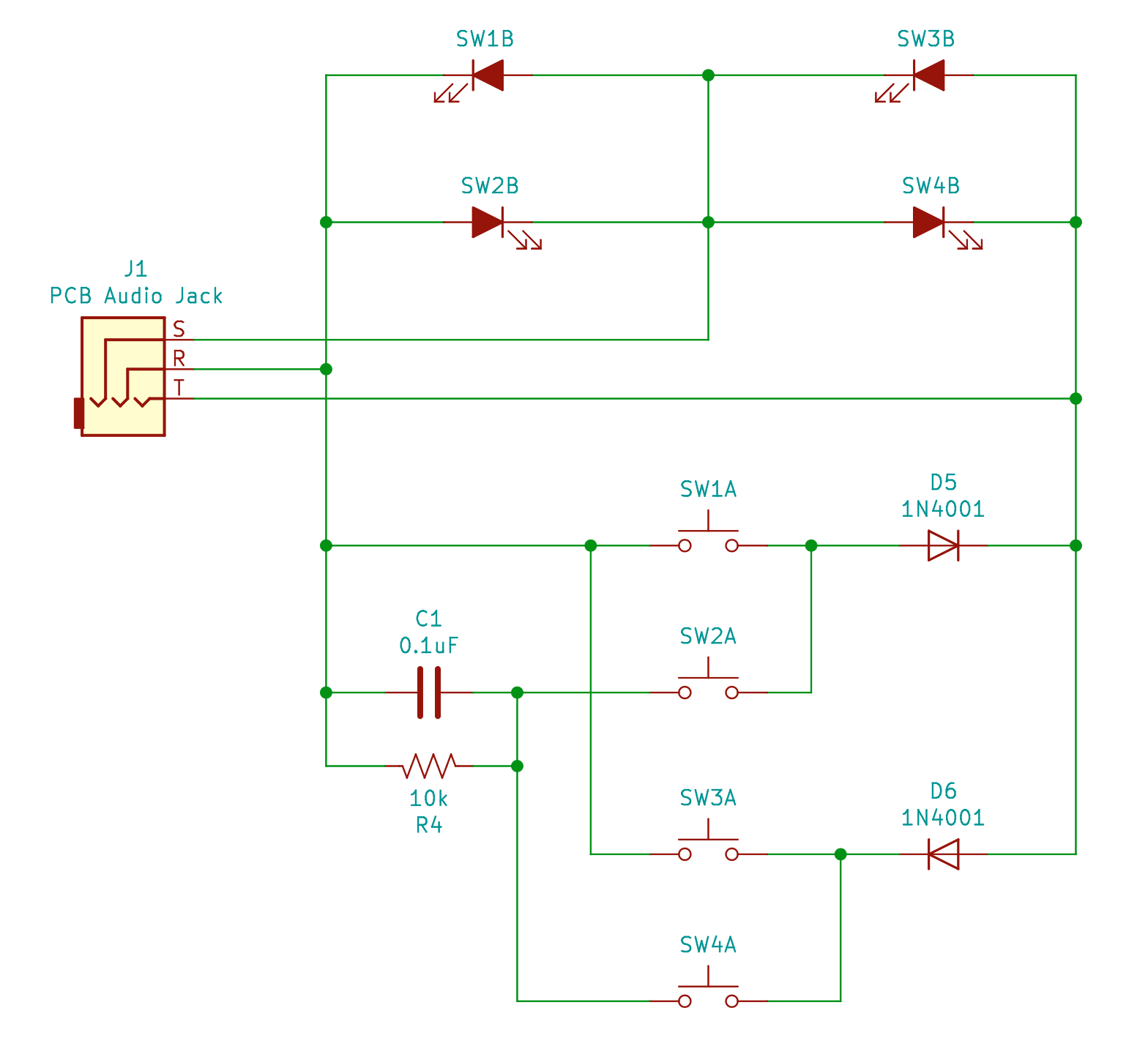
Up top we have 4 LEDs from a standard 3 wire Charlieplex setup. Instead of the remaining 2 LEDs from the 3 wire ‘plex at the bottom we have a two button Charlieplex pair plus two bonus buttons on an RC circuit. Given the scary analog circuit the scan method is pleasingly simple. By driving the R and T lines quickly the micro can check if there is a short, indicating a pressed switch. Once that’s established it can run the same scan again, this time pausing to let the cap charge before sensing. After releasing the line if there is no charge then the cap must have been shorted, meaning that switch was pressed. Else it must be the other non-cap switch. Check out the repo for hardware and firmware sources.
Last time we talked about a similar topic a bunch of readers jumped in to tell us about their favorite ways to add more devices to limited IOs. If you have more clever solutions to this problem, leave them below! If you want to see the Twitter thread with older schematics and naming of Tucoplexing look after the break.
Low-voltage DC power electronics are an exciting field right now. Easy access to 18650 battery cells and an abundance of used Li-Ion cells from laptops, phones, etc. has opened the door for hackers building their own battery packs from these cheap cells. A big issue has been the actual construction of a pack that can handle your individual power needs. If you’re just assembling a pack to drive a small LED, you can probably get by with spring contacts. When you need to power an e-bike or other high power application, you need a different solution. A spot welder that costs $1000 is probably the best tool, but out of most hackers’ budget. A better solution is needed.
Vruzend v2 Battery Caps.
Enter [Micah Toll] and his Vruzend battery connectors, whose Kickstarter campaign has exceded its goal several times over. These connectors snap onto the ends of standard 18650 cells, and slot together to form a custom-sized battery pack. Threaded rods extend from each plastic cap to enable connection to a bus bar with just a single nut. The way that you connect each 18650 cell determines the battery pack’s voltage and current capability. There are a couple of versions of the connector available through the campaign, and the latest version 2.0 should allow some tremendously powerful battery pack designs. The key upgrade is that it now features corrosion-resistant, high-power nickel-plated copper busbars allowing current up to 20A continuous. A side benefit of these caps instead of welded tabs is that you can easily swap out battery cells if one fails or degrades over time. Continue reading “Assemble Your Own Modular Li-Ion Batteries”→
Most CNC robots people see involve belts and rails, gantries, lead screws, linear bearings, and so forth. Those components need a rigid chassis to support them and to keep them from wobbling during fabrication and adding imperfections to the design. As a result, the scale is necessarily small — hobbyist bots max out at cabinet-sized, for the most part. Their rigid axes are often laid out at Cartesian right angles.
One of the exceptions to this common configuration is the delta robot. Deltas might be the flashiest of CNC robots, moving the end effector on three arms that move to position it anywhere in the build envelope. A lot of these robots are super fast and precise when charged with carrying a light load, and they get put to work as pick-and-place machines and that sort of thing. It doesn’t hurt that delta bots are also parallel manipulators, which means that the motors work together to move the end effector, with one motor pulling while the matching motor pulls.
But while Cartesian CNC bots are sturdy workhorses, and deltas are fly-weight racehorces, neither can really cut it when you want to go gigantic. In terms of simplicity and scale, nothing beats cable bots.
Cable Bots
Cable bots use wires or strings pulled by reel-mounted motors, with dimensions limited only by the room to mount the motors and the tensile strength of the cables used. When the strings are tensioned you can get a surprising degree of accuracy. Why not? Are they not computer-controlled motors? As long as your kinematic chain accounts for the end effector’s movement in one direction by unwinding another cable (for instance) you can very accurately control the end effector over a very wide scale.
The following are some fun cable bots that have caught my eye.