[Debasish Dutta] has designed a few weather stations in the past, and this, the fourth version of the system has had many of the feature requests from past users rolled in. The station is intended to be used with an external weather sensor unit, provided by Sparkfun. This handles wind speed and direction, as well as measuring rainfall. A custom PCB hosts an ESP32-WROOM module and an Ai-Thinker Ra-02 LoRa module for control and connectivity respectively. A PMS5003 sits on the PCB to measure those particulate densities, but most sensors are connected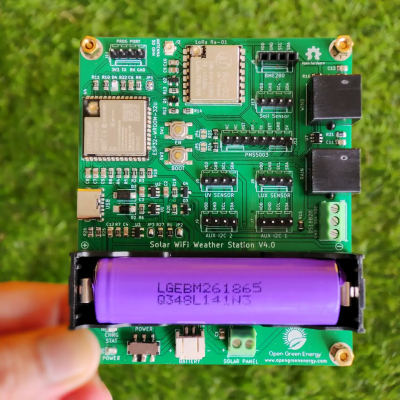 with simple 4-way I2C connectors. Temperature, humidity, and pressure are handled by a BME280 module, UV Index (SI1145), visible light (BH1750) even soil humidity and temperature with a cable-mounted SHT10 module.
with simple 4-way I2C connectors. Temperature, humidity, and pressure are handled by a BME280 module, UV Index (SI1145), visible light (BH1750) even soil humidity and temperature with a cable-mounted SHT10 module.
All this is powered by a solar panel, which charges a 18650 cell, and keeps the show running during the darker hours. For debugging and deployment, a USB-C power port can also be used to provide charge. A 3D printed Stevenson screen type enclosure allows the air to circulate amongst the PCB-mounted sensor modules, without hopefully too much moisture making it in there to cause mischief.
On the data collection and visualization side, a companion LoRa receiver module is in progress, which is intended to pass along measurements to a variety of services. Think Home Assistant, ESP home, and that kind of thing. Software is still a work in progress, so maybe check back later to see how [Debasish] is getting on with that?
This kind of multi-sensor hosting project is nothing new here, here’s a 2019 Hackaday prize entry along the same lines. Of course, gathering and logging measurement data is only part of the problem, visualization of those measurements is also important. Why not use a mechanical approach, such as a diorama?