Interviewing to be a full-stack engineer is hard. It’s a lot harder than applying for a junior dev job where you’re asked to traverse a red-black tree on a whiteboard. For the full-stack job, they just give you a pile of 2N2222 transistors. (The first company wasn’t a great fit, and I eventually found a place that gave me some 2N2907s for the interview.) That said, there’s a certain challenge in seeing how far you can push some doped silicon. Case in point, [Alastair Hewitt]. He’s building a computer to browse the world wide web from the gate level up.
The goal of this project is to browse the web using only TTL logic. This presents problems that aren’t readily apparent at first glance. First up is being able to display text on a screen. The easiest way to do this now is to get a whole bunch of modern memories that are astonishingly fast for a 1970s vintage computer. This allows for VGA output, and yes, we’ve seen plenty of builds that output VGA using some big honkin’ memories. It turns out these RAM and ROM chips are a little better than the specs say they are, and this computer is overclocked from the very beginning.
A bigger problem is how to interface with a network. This is a problem for very old computers, but PPP still exists and if you have the software stack you can read something from a server over a serial connection. [Alistar] actually found the UART frequency was more important than the dot clock frequency of VGA, and the system clock must therefore be built around the serial port, not the display interface. This means the text mode interface is actually 96 columns instead of the usual 80 columns.
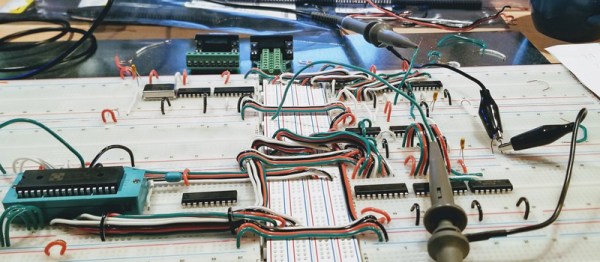
It’s very easy to say that you’re building a computer on a bread board. It’s another thing entirely to actually do it. This is actually a surprisingly well-though out sketch of a computer system that will, theoretically, be able to connect to the Internet. Of course, the reality of the situation is that this computer will be connecting over serial to a computer that’s connected to the Internet, but there’s no shame in that. You can check out the progress on the GitHub for this project.