It’s no shock that electric eels get a bad rap for being scary creatures. They are slithery fleshy water snakes who can call down lightning. Biologists and engineers at the University of California had something else in mind when they designed their electric eel. Instead of hunting fish, this one swims harmlessly alongside them.
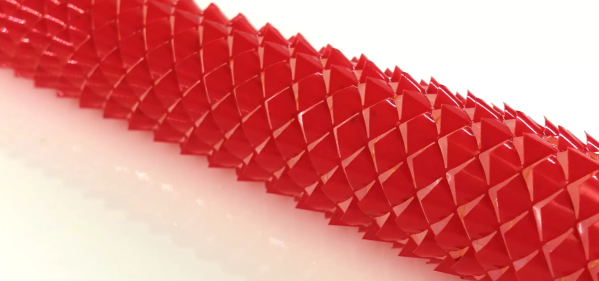
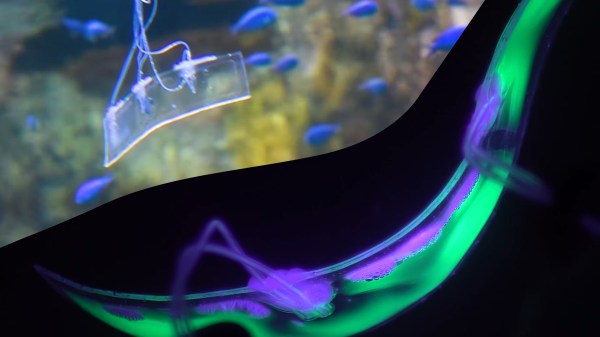
Traditional remotely operated vehicles have relied on hard shells and spinning propellers. To marine life, this is noisy and unnatural. A silent swimmer doesn’t raise any eyebrows, not that fish have eyebrows. The most innovative feature is the artificial muscles, and although the details are scarce, they seem to use a medium on the inside to conduct a charge, and on the outside, the saltwater environment conducts an opposite charge which causes a contraction in the membrane between to the inside and outside. Some swimming action can be seen below the break, and maybe one of our astute readers can shed some light on this underwater adventurer’s bill of materials.
One of our favorite submarines is the 2017 Hackaday Prize winner, The Open Source Underwater Glider. For a more artistic twist on submersibles, the Curv II is one of the most elegant we have seen.