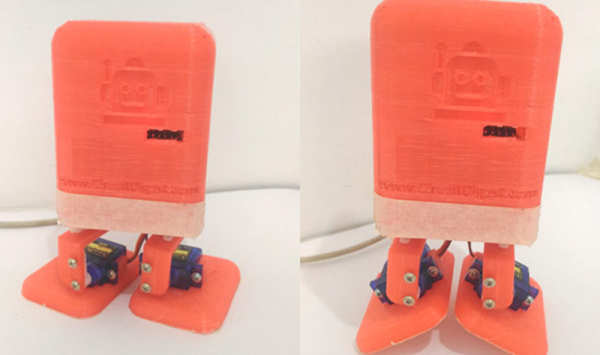
If you have a few servo motors, an Arduino, and a Bluetooth module, you could make Biped Bob as a weekend project. [B. Aswinth Raj] used a 3D printer, but he also points out that you could have the parts printed by a service or just cut them out of cardboard. They aren’t that complex.
Each of Bob’s legs has two servo motors: one for the hip and one for the ankle. Of course, the real work is in the software, and the post breaks it down piece-by-piece. In addition to the Arduino code, there’s an Android app written using Processing. You can build it yourself, or download the APK. The robot connects to the phone via BlueTooth and provides a simple user interface to do a few different walking gaits and dances. You can see a few videos of Biped Bob in action, below.
This wouldn’t be a bad starter project for a young person or anyone getting started with robotics, especially if you have a 3D printer. However, it is fairly limited since there are no sensors. Then again, that could be version two, if you were feeling adventurous.
We have mixed feelings about the BlueTooth control. BlueTooth modules are cheap and readily available, but so are ESP8266s. It probably would not be very difficult to put Bob on WiFi and let him serve his own control page to any web browser.
If Bob meets Jimmy, he may find himself envious. However, Jimmy would be a little more challenging to build. We’ve actually seen quite a few walking ‘bots over the years. Continue reading “Biped Bob Walks And Dances”