Whether it’s wheels, tracks, feet, or even a roly-poly body like BB-8, most robots have to deal with an essential problem: dirt and grit can get into the moving bits and cause problems. Some researchers from UCSD have come up with a clever way around this: pneumatically actuated soft-legged robots that adapt to rough terrain.
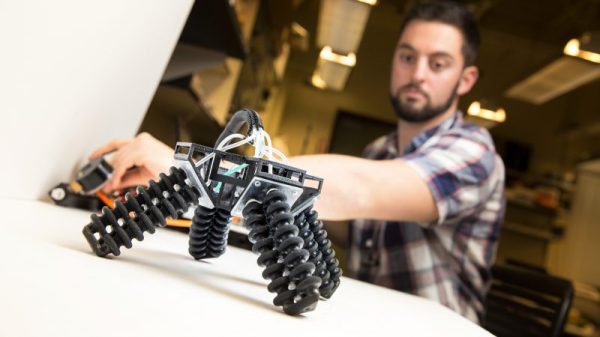
At a top speed of 20 mm per second, [Michael Tolley]’s squishy little robot won’t set any land speed records. But for applications like search and rescue or placing sensors in inhospitable or inaccessible locations, slow and steady might just win the race. The quadrupedal robot’s running gear can be completely 3D-printed on any commercial printer capable of using a soft filament. The legs each contain three parallel air chambers within a bellowed outer skin; alternating how the chambers are inflated controls how they move. The soft legs adapt to unstructured terrain and are completely sealed, eliminating intrusion problems. The video below shows how the bot gets around just fine over rocks and sand.
The legs remind us a little of our [Joshua Vazquez]’s tentacle mechanism, but with fewer parts. Right now, the soft robot is tethered to its air supply, but the team is working on a miniaturized pump to make the whole thing mobile. At which point we bet it’ll even be able to swim.
Continue reading “Soft-legged Robot Handles Rough Terrain With Ease”