There were many toy robots back in the 80s that were — frankly — underwhelming by today’s standards. Back then, any old thing that rolled around with some blinking lights would impress, but the bar is higher today. Then again, some of the basic components won’t really change. You still need wheels, motors, batteries, and all that. But the computers we can bring to bear today are much better. Maybe that’s why so many people, including [mcvella], decide to give these venerable toys like the OmniBot 2000 a facelift or, maybe a better analogy, a brain transplant.
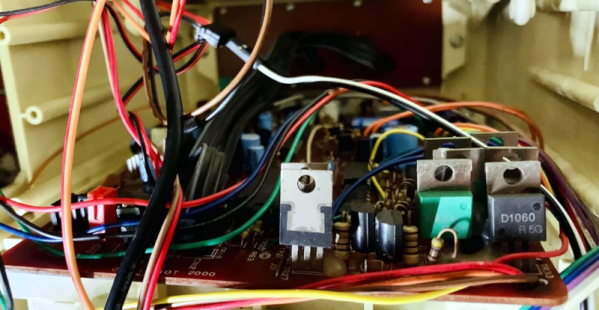
In this particular case, the brain in question is a Raspberry Pi. The robot will also sport new sensors, motor controllers, and a webcam. There is also a new battery pack in play. The project doesn’t cover working with the single powered gripper arm. The left arm isn’t motorized. There is also a cassette tape deck you could probably make do something interesting. Of course, with a Raspberry Pi, you get wireless control, and the project uses Viam to define and control the robot’s motion.
There is some retro cool factor to using a robot like Ominbot. However, we might be more tempted to just build our own. With a 3D printer, a laser cutter, and a few motors, you could make something that would be about equivalent or better with little effort.
We have seen OmniBot conversions before, particularly over on Hackaday.io. Maybe someone will convert one over to steam power.