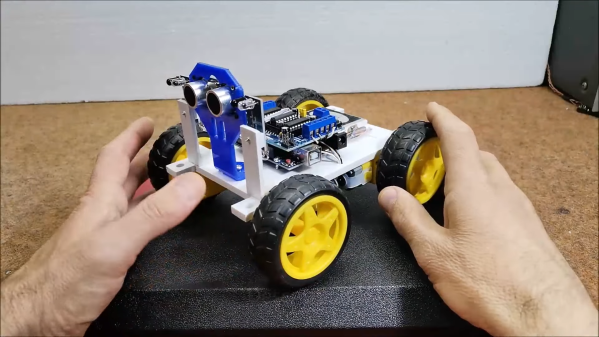
The build relies on the classic Arduino Uno microcontroller, which talks to a HC-SR04 ultrasonic sensor module and two infrared sensors in order to track a human target and follow it around. Drive is thanks to four DC gear motors, driven by a L293D motor driver, with a two-cell lithium battery providing power for everything onboard.
The robot works in a simple manner, following a hand placed in front of the robot’s sensors. First, the robot checks for the presence of an object in front using the ultrasonic sensor. If something is detected, the twin infrared sensors mounted left and right are used to guide the robot, following the hand.
If you want to build your own rover, there’s plenty of cheap RC trucks out there that will provide a serviceable chassis to work with. Looking to go airborne with a custom drone? Thanks to the immense popularity of first-person view (FPV) flying, you’ll find a nearly infinite variety of affordable fixed wing and quadcopter platforms out there to chose from. But when it comes to robotic watercraft, the turn-key options aren’t nearly as plentiful; the toys are all too small, and the commercial options are priced for entities that have an R&D budget to burn. For amateur aquatic explorers, creativity is the name of the game.
Take for example this impressive vessel built by [wesgood]. With a 3D printed electronics enclosure mounted to a pair of pontoons made of cheap 4-inch PVC pipe available from the hardware store, it provides a stable platform without breaking the bank. Commercial jet drive units built into the printed tail caps for the pipes provide propulsion, and allow the craft to be steered through differential thrust. Without rudders or exposed propellers, this design is particularly well-suited for operating in shallow waters.
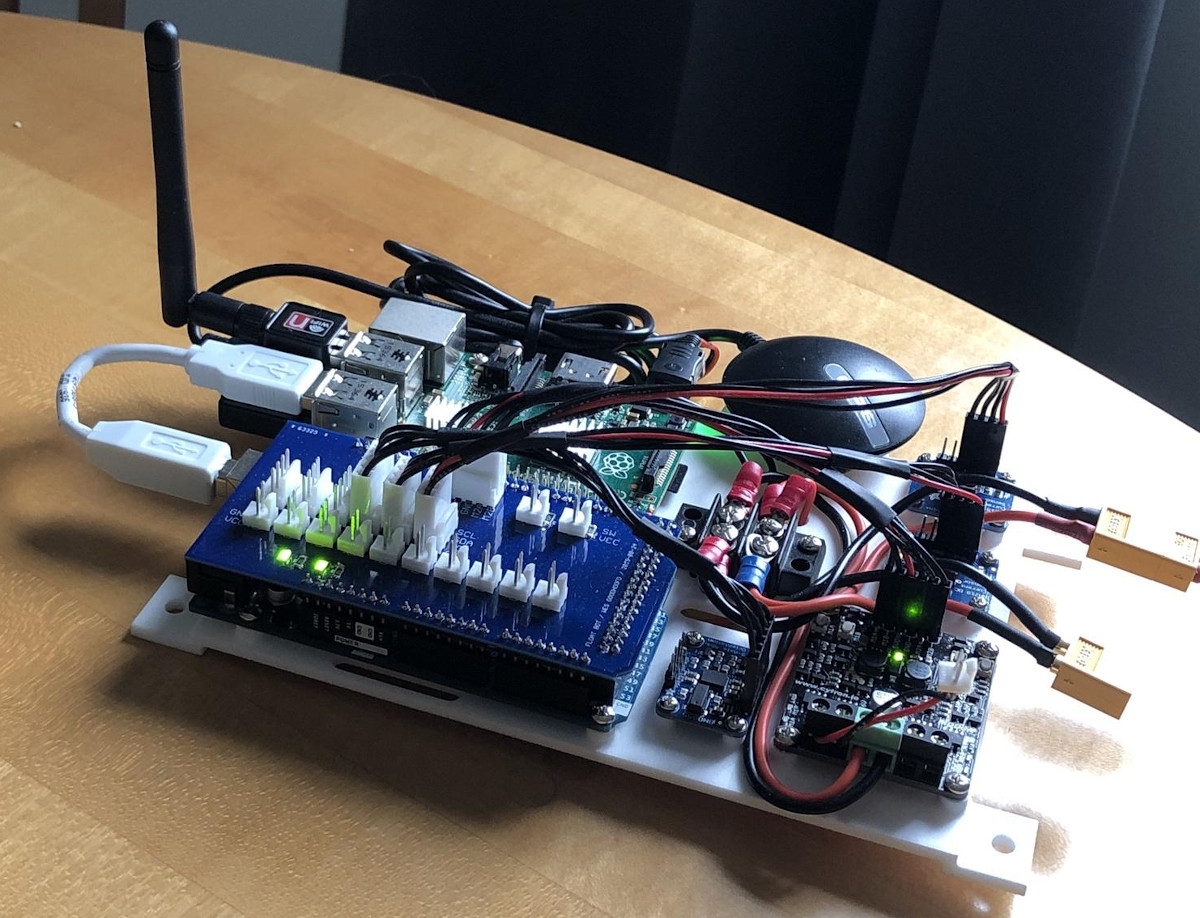
A removable electronics tray allows for easy access.
Perched high above the water, the electronics box contains a Raspberry Pi 2, BU353 USB GPS receiver, and a Arduino Mega 2560 paired with a custom PCB that offers up convenient ports to connect a dual-channel Cytron 3 amp motor driver and Adafruit BNO055 9-DOF IMU. Power is provided by two 6,000 mAh LiPo batteries mounted low in the pontoons, and a matching pair of Adafruit current/voltage sensors are used to keep track of the energy budget. A small USB WiFi dongle with an external antenna plugged into the Pi offers up a WiFi network that [wesgood] can connect to with an iPad for control.
If the control software for the craft looks particularly well-polished, it’s probably because [wesgood] just so happens to be a professional developer with a focus on mobile applications. While we’re a bit skeptical of using WiFi for a critical long-distance link, we can’t deny that the iPad allows for a very slick interface. In addition to showing the status of the craft’s various systems, it lets the user either take manual control or place waypoints for autonomous navigation — although it sounds like that last feature is only partially implemented right now.
Cleaning robots are great and all, but they don’t really excel when it comes to speed. If your room looks like a pigsty and your Tinder date is arriving in twenty minutes, you’ll need more than a Roomba to make a good impression. [Luis Marx] ran into this exact problem and decided to solve it by building the world’s fastest cleaning robot (video, embedded below).
[Luis] built his ‘bot from the ground up, inspired by the design of your average robot vacuum: round, with two driven wheels and some sensors to avoid obstacles. A sturdy aluminium plate forms the chassis, onto which two powerful motors are placed to drive a pair of large-diameter wheels. The robot’s body is made from 3D-printed components and sports a huge LED display on top that functions as a speedometer of sorts.
Building a vacuum system turned out to be rather difficult, and since [Luis] already had a robot vacuum anyway, he decided to make this a robot mop instead. A little tank stores water and soap, which is pumped onto a microfibre cloth that’s attached using a magnetic strip. Obstacle avoidance is implemented through three ultrasonic distance sensors: when the robot is about to run into something it will brake and turn in the direction where it senses the most empty space.
All of that sounds great, but what about the speed? According to [Luis]’s calculations, it should be able to reach 60 km/h, although his living room is too small to put that into practice. Whether it will provide much in the way of cleaning at that speed is debatable too, but who cares: having your own ultra-high-speed robot mop will definitely impress your date more than any amount of cleaning.
We’ve featured a home-made robot mop before, but it looks excruciatingly slow compared to this one. If you’re planning to build zippy indoor robots, you might want to look into fast navigation systems like tracking ceiling lights.
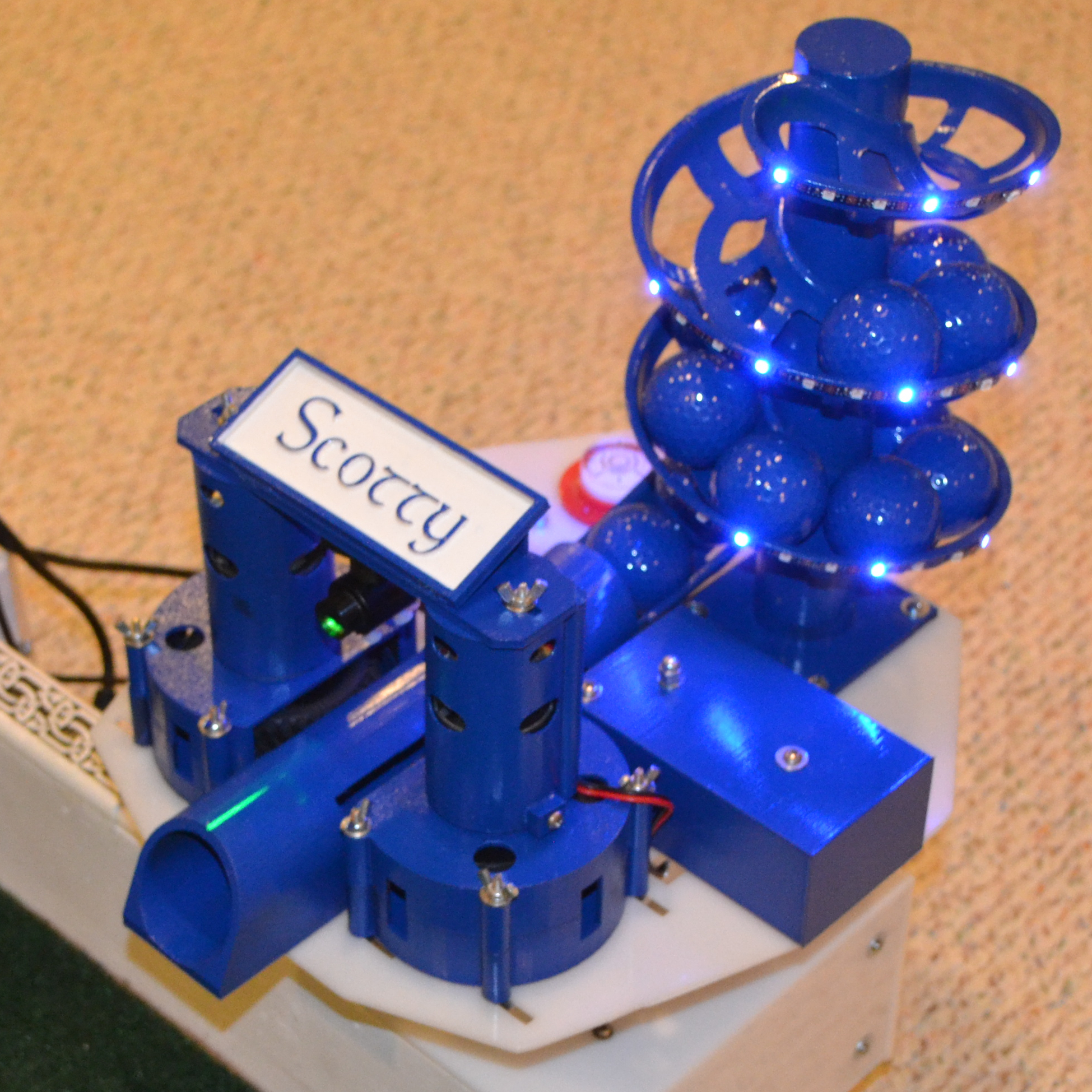
We’ve just come across [Bithead]’s amazing, robotically-automated mashup of miniature golf and Connect Four, which also includes an AI opponent who pulls no punches in its drive to win. Connect Fore! celebrates Scotland — the birthplace of golf, after all — and looks absolutely fantastic.
Scotty the AI opponent uses this robotic turret to make their moves in a game of Connect Fore!
The way it works is this: players take turns putting colored balls into one of seven different holes at the far end of the table. Each hole feeds to a clear tube — visible in the middle of the table — which represent each of the columns in a game of Connect Four.
Each player attempts to stack balls in such a way that they create an unbroken line of four in their color, either horizontally, vertically, or diagonally. In a one-player game, a human player faces off against “Scotty”, the computer program that chooses its moves with intelligence and fires balls from a robotic turret.
[Bithead] started this project as a learning experience, and being such a complex project, the write-up is extensive. We really recommend reading through the whole thing if you are at all interested in what goes into making such a project work.
What’s particularly interesting is all of the ways in which things nearly worked, or needed nudging or fine adjustment. One might think that reliably getting a ball to enter a hole and roll down a PVC tube wouldn’t be a particularly finicky task, but it turns out that all kinds of things can go wrong.
Even finding the right play surface was a challenge. [Bithead]’s first purchase from Amazon was a total waste: it looked bad, smelled bad, and balls didn’t roll well on it. There are high-quality artificial turfs out there, but the good stuff gets shockingly expensive, and such a small project pretty much pigeonholes one as a nuisance customer when it comes to vendors. The challenges [Bithead] overcame serve as a reminder to keep the 80/20 rule (or Pareto principle) in mind when estimating what will get a project to the finish line.
Right under the page break below is a brief video tour of the completed table, and after that, you can watch a game in action as [Bithead] faces off against Scotty the AI. Curious about the inner workings? The last video has some build details that fill in a few blanks from the write-up.
[Enza3D] shows off a surprisingly compact articulated animatronic eyeball that can be intuitively controlled with a Wii nunchuk controller. The design uses 3D printed parts and some tiny servos, and all of the necessary electronics can be easily purchased online. The mechanical design of the eye is very impressive, and [Enza3D] walks through several different versions of the design, the end result of which is a tidy little assembly that would fit nicely into masks, costumes, or other projects.
A Wii nunchuk is ideal for manual control of such a device, thanks to its ergonomic design and ease of interface (the nunchuk communicates over I2C, which is easily within the reach of even most modest of microcontrollers.) Of course, since driving servos is also almost trivial nowadays, it doesn’t look like working this into an automated project would pose much of a challenge.
Robotic mowers are becoming a common sight in some places, enabled by the cost of motors and the needed control electronics being much lower, thanks to the pace of modern engineering. But, in many cases, they still appear to be really rather dumb, little more than a jacked up bump-and-go with a spinning blade. [Clemens Elflein] has taken a cheap, dumb mower and given it a brain transplant based around a Raspberry Pi 4 paired up with a Raspberry Pi Pico for the real time control side of things. [Clemens] is calling this OpenMower, with the motivation to create an open source robot mower controller with support for GPS navigation, using RTK for extra precision.
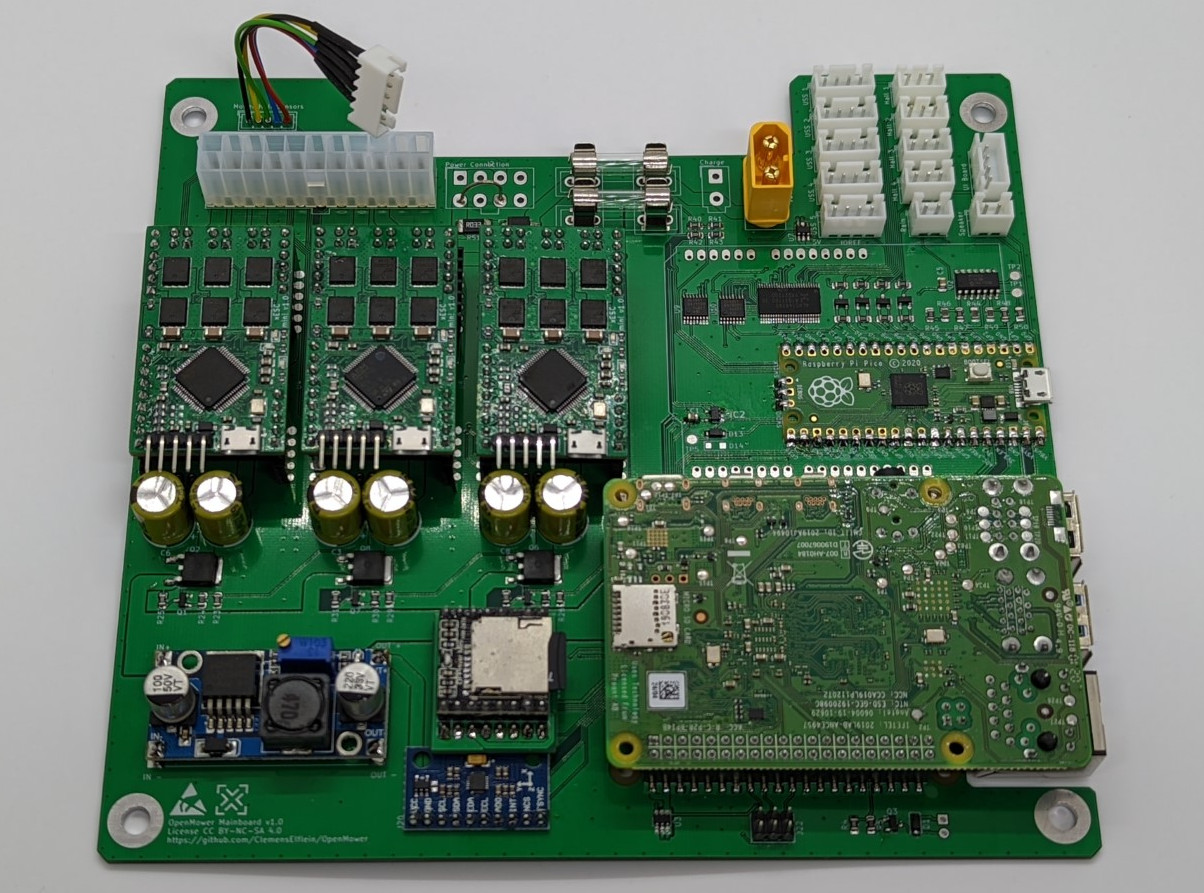
The donor robot was a YardForce Classic 500, and after inspection of the control PCB, it looks like many other robot mower models are likely to use the same controller and thus be compatible with the openmower platform. A custom mainboard houses the Pi 4 and Pico, an ArduSimple RTK GPS module (giving a reported navigational accuracy of 1 cm,) as well as three BLDC motor drivers for the wheels and rotor. Everything is based on modules, plugging into the mainboard, reducing the complexity of the project significantly. For a cheap mower platform, the Yardforce unit has a good build quality, with connectors everywhere, making OpenMower a plug and play solution. Even the user interface on top of the mower was usable, with a custom PCB below presenting some push buttons at the appropriate positions.
OpenMower mainboard
Motor control is courtesy of the xESC project, which provides FOC motor control for low cost, interfacing with the host controller via a serial link. This is worth looking into in its own right! On the software side of things, [Clemens] is using ROS, which implements the low level robot control, path planning (using code taken from Slic3r) as well a kinematics constraints for object avoidance. The video below, shows how simple the machine is to operate — just drive it around the perimeter of lawn with a handheld controller, and show it where obstacles such as trees are, and then set it going. The mower is even capable of mowing multiple lawns, making the journey between them automatically!
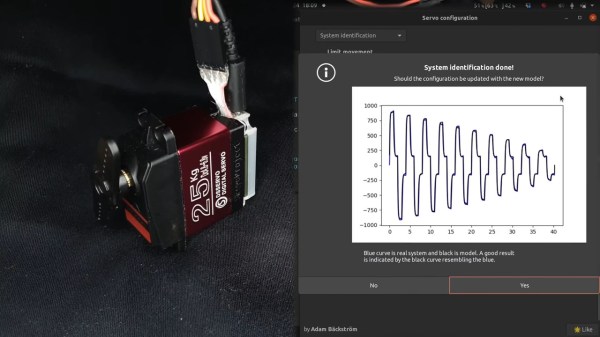
Today, we shall talk about how [Adam Bäckström] took a DS3225 servo and rebuilt it to improve its accuracy, then built a high-precision robot arm with those modified servos to show just how much of an improvement he’s got – up to 36 times better positional accuracy. If this brings a déjà vu feeling, that’s because we’ve covered his servo modifications before, but now, there’s more. In a year’s time since the last video came out, [Adam] has taken it to the next level, showing us how the modification is made, and how we ourselves can do it, in a newly released video embedded below.
After ordering replacement controller PCBs designed by [Adam] (assembled by your PCBA service of choice), you disassemble the servo, carefully setting the gearbox aside for now. Gutting the stock control board is the obvious next step, but from there, you don’t just drop the new PCB in – there’s more to getting a perfect servo than this, you have to add extra sensing, too. First, you have to print a spacer and a cover for the control board, as well as a new base for the motor. You also have to print (or perhaps, laser-cut) two flat encoder disks, one black and one white, the white one being eccentric. It only escalates from here!