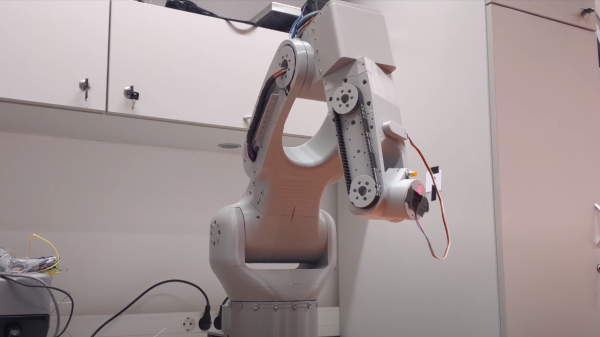
[Petar Crnjak]’s Faze4 is a open source robotic arm with 3D printable parts, inspired in part by the design of industrial robot arms. In particular, [Petar] aimed to hide wiring and cables inside the arm as much as possible, and the results look great! Just watch it move in the video below.
Cycloidal gearboxes have been showing up in robotic arm projects more and more, and Faze4 makes good use of them. Why cycloidal gears? They are readily 3D printed and offer low backlash, which makes them attractive for robotic applications. There’s no need to design cycloidal gears from scratch, either. [Petar] found this cycloidal gear generator in OnShape extremely useful when designing Faze4.
The project’s GitHub repository has all the design files, as well as some video demonstrations and a link to assembly documentation for anyone who would like to make their own. Watch Faze4 go through some test movements in the video embedded below.
In the fast food industry, speed is everything. The concept has never just been about cooking quickly. Players in this competitive space spend huge fortunes every year on optimizing every aspect of the experience, from ordering, to queueing, to cleaning up afterwards. And while fast food restaurants are major employers worldwide, there’s always been a firm eye cast over the gains that automation has to offer.
Flipping Burgers
In the West, fast food most commonly brings burgers to mind. Preparing a quality burger requires attention to the grade of meat, fat content, as well as the preparation steps before it hits the grill. Then it’s all about temperature and time, and getting just the right sear to bring out the natural flavors of the beef. While a boutique burger joint will employ a skilled worker to get things just right, that doesn’t fly for fast food. Every order needs to be preparable by whichever minimum-wage worker got the shift, and be as repeatable as possible across entire countries, or even the world, to meet customer expectations.
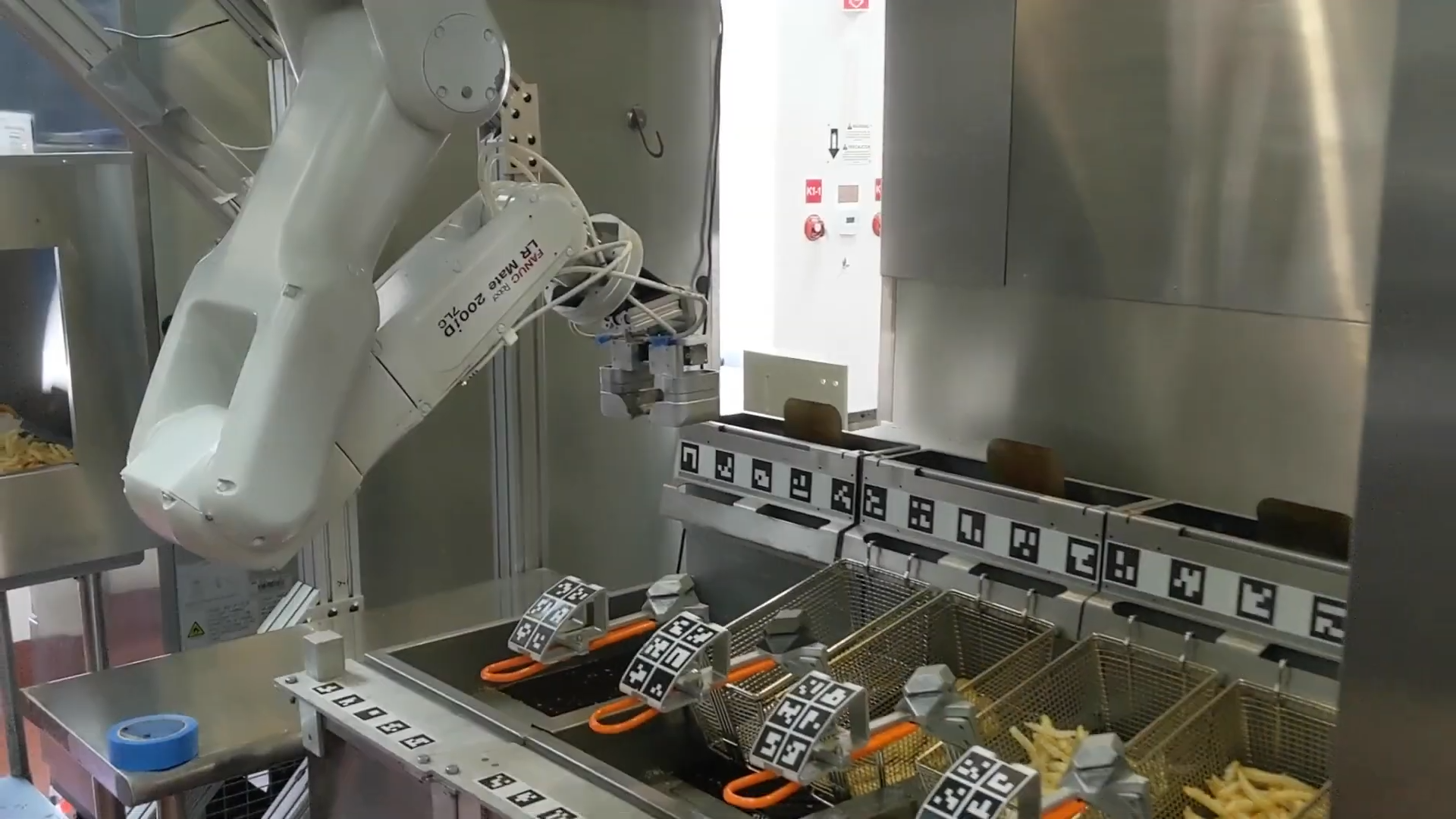
Flippy ROAR (Robot On A Rail) at work on the fryers in a White Castle in Chicago.
In their efforts to improve efficiency, White Castle have taken the bold step of installing a robotic burger flipper, imaginitively named Flippy. Built by Miso Robotics, the robot hangs from a ceiling rail to minimise the space taken up in the kitchen area. Based on a Fanuc robot arm, the system uses artificial intelligence to manage kitchen resources, Flippy is capable of managing both the grill and fryers together to ensure fries don’t get cold while the burgers are still cooking, for example. Currently undergoing a trial run in Chicago, White Castle has ambitions to roll the technology out to further stores if successful.
We’ve seen other robotic burger systems before, too. In late 2018, our own [Brian Benchoff] went down to check out Creator, which cooks and assembles its burgers entirely by machine. Despite suspicions about the business model, Creator have persisted until the present day with their unique blend of technology and culinary arts. Particularly impressive were their restaurant modifications in the face of COVID-19. The restaurant received an overhaul, with meals being robotically prepared directly in a take-out box with no human contact. Take-out meals are double-bagged and passed to customers through an airlock, with a positive-pressure system in the restaurant to protect staff from the outside world.
Pizzabots
Pizza is a staple food for many, with high demand and a stronger dependence on delivery than other fast food options. This has led to the industry exploring many avenues for automation, from preparation to order fulfillment.
In terms of outright throughput, Zume were a startup that led the charge. Their system involves multiple robots to knead dough, apply sauce and place the pie in the oven. Due to the variable nature sizes and shapes of various toppings, these are still applied by humans in the loop. Capable of turning out 120 pizzas per hour, a single facility could compete with many traditional human-staffed pizza shops. They also experimented with kitchens-on-wheels that use predictive algorithms to stock out trucks that cook pizzas on the way to the customer’s door. Unfortunately, despite a one-time $4 billion USD valuation, the startup hit a rocky patch and is now focusing on packaging instead.
Picnic aim to make lots of pizza, fast. Their business model involves working directly with existing restaurants, rather than creating their own fast-food brand from scratch.
Picnic have gone further, claiming an output rate of up to 300 twelve-inch pies an hour. The startup aims to work with a variety of existing pizza restaurants, rather than striking out as their own brand. One hurdle to overcome is the delivery of a prepared pizza into the oven. There are many varieties and kinds of pizza oven used in commercial settings, and different loading techniques are required for each. This remains an active area of development for the company. The company has a strong focus on the emerging ghost kitchen model, where restaurants are built solely to fulfill online delivery orders, with no dining area.
Domino’s is one of the largest pizza companies in the world, and thus far have focused their efforts on autonomous delivery. The DRU, or Domino’s Robotic Unit, was launched to much fanfare, promising to deliver pizzas by a small wheeled robotic unit. Equipped with sensors to avoid obstacles and GPS navigation, the project has not entered mainstream service just yet. However, between this and the multitude of companies exploring drone delivery, expect to see this become more of a thing in coming years.
Despite the marketing sizzle, the DOM Pizza Checker does not project holograms.
A more immediate innovation from Domino’s has been the DOM Pizza Checker. With customer complaints about pizza quality plaguing the chain, the pizza checker is an AI-powered visual system. It’s responsible for determining if the correct pizza has been made, with the right toppings and good distribution. An impressive practical use of AI imaging technology, it sounds an alarm if the pizza isn’t up to scratch, prompting it to be remade. However, it has come under scrutiny as a potential method to harass franchisees and workers. Additionally, the limitations of the system mean that Domino’s are still perfectly capable of turning out a bad pizza on occasion.
Other Efforts
One of the most visible examples of fast food automation is the widespread adoption of order kiosks by McDonalds, which kicked off in earnest in 2015. The majority of stores in the US now rely on these to speed up the ordering process, while also enabling more customization for customers with less fuss. Over-the-counter ordering is still possible at most locations, but there’s a heavy emphasis on using the new system.
McDonald’s automated beverage dispenser will be a familiar sight to many. Considered a great help when it works, and a great hindrance when it jams, spills, or simply shuts down.
In general, online ordering and delivery has become the norm, where ten years ago, the idea of getting McDonalds delivered was considered magical and arcane. This writer made seven attempts to take advantage of an early version of the service in China in 2015, succeeding only once, largely due to a lack of understanding of addresses written in non-Latin characters. However, due to the now-ubiquitous nature of services like Ubereats, Postmates, and Menulog, it’s simple for any restaurant to largely automate their ordering and fulfillment process, and reach customers at a distance from their brick-and-mortar locations.
Other efforts are smaller in scope, but contribute to great efficiency gains back-of-house. McDonalds and other chains have widely adopted automated beverage systems. Capable of automatically dispensing cups and the requisite fluids, they take instructions directly from the digital ordering system and take the manual labor out of drink preparation. They’re also great at slightly underfilling the cups, in a way that any human would consider incredibly rude.
Conclusion
Robots in the fast-food kitchen stand to reduce or eliminate tedious, repetitive work. Robots don’t get sick, and less human labour means fewer rostering hassles. It seems to be a foregone conclusion that more automation is on the way, and while some startups may falter, others will surely succeed. Your next meal may just yet be entirely prepared by a robot, even if it’s still delivered by a tired grad student on a moped. Come what may!
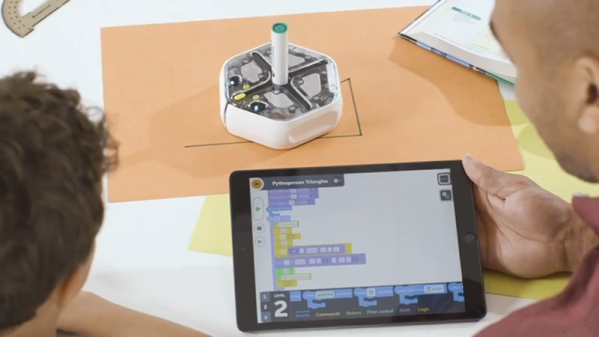
When you think of iRobot, you probably think of floor cleaning or military robots. But they also have a set of robots aimed at education. The Root robot — an acquisition the company made in 2019 — originally targeted classrooms and cost about $200 each. A new version costs about $130 and is a better fit for home users.
The original version — Root rt1 — is still available, but the rt0 version has several missing features to hit the desired price. What’s missing? Apparently, the rt1 can stick to a whiteboard using magnets, but that feature is missing on the rt0. There are also no “cliff” sensors or color scanner.
As time marches on and a good percentage of us are still isolating from society at large, the progress of technology isn’t kept as stagnant. Earlier this year we featured a project about a much-needed small telepresence robot with an exceptionally low barrier for entry, and with the progress of time it has received several upgrades and some crowdfunding, all while preserving its original intent of a simple and easily-operated way of keeping in contact with others.
The new robot is still based on the cardboard design that holds a smartphone and drives it around using a microcontroller platform, but thanks to its small size and low power requirement this seems to suit it nicely. Improvements over the original design include a more robust one-size-fits-all phone mount and a more refined cardboard body. Also, since the small size is a little bit of a downside when navigating anywhere that isn’t a desk or counter, the new version makes it easier to make modifications such as adding a pedestal which can elevate the phone and improve the experience of the remote driver. A number of other optional modifications are possible as well, including a grabbing arm.
While telepresence robots unfortunately are needed now more than ever, we are happy to see people like [Ross] take on projects like this which will hopefully help improve our shared situation by allowing us to have a more involved level of contact with people we would otherwise prefer to see in person. If you’d like to build your own without waiting on the crowdfunding, be sure to check out the original project we featured back in April.
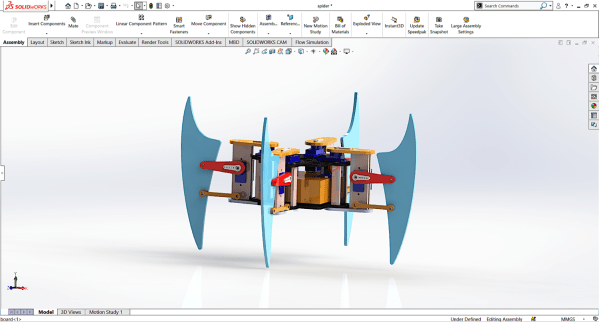
Miles uses twelve servos to control its motion, three on each of its legs, and also includes a standard HC-SR04 ultrasonic distance sensor for some obstacle avoidance capabilities. Twelve servos can use quite a bit of power, so [_Robox_] had to power Miles with six LM7805 ICs to get sufficient current. [_Robox_] laser cut acrylic sheets for Miles’s body but mentions that 3D printing would work as well.
By now you’re saying “wait, spiders have eight legs”, and of course you’re right. But that’s an awful lot of servos. Anyway, if you’d rather 3D print your four-legged spider, we have a suggestion.
Sticking the perfect landing can take years of practice for a human gymnast, and it seems the same is true for little monopedal jumping robots. Salto-1P, an old acquaintance here on Hackaday, always needed to keep jumping to stay upright. With some clever control software improvements, it can now land reliably on an area the size of a coin, and then stay there. (Video after the break)
[Justin Yim] from the UC Berkeley’s Biomimetics Lab has been working on Salto for the past four years, and we’ve covered it twice before. Attitude control is handles by a combination of propeller thrusters for roll and yaw, and a reaction wheel for pitch.While it was already impressive before, it had a predictable landing area about the size of a dinner plate.
The trick to the perfect landing is a combination of landing angle, angular velocity and angular momentum. Salto can only correct for ±2.3° of landing angle error, because it doesn’t have a second foot to catch itself when something goes wrong. Ideally the robot’s angular velocity and momentum should be as close as possible to 0 at takeoff, which gives the reaction wheel maximum control authority in flight, as well as on landing. Basically a well executed takeoff directly influences the chances of a good landing. [Justin] does an excellent job explaining all this and more on the project’s presentation video.Continue reading “Little Jumping Bot Can Now Stick The Perfect Landing”→
[Donald Bell’s] robotic bartender entry into the 2020 Cocktail Robotics Grand Challenge is one of those things that sounds easy until you start getting into the details. After all, how hard is it to dispense some liquids into a glass? Harder than you might think. Sure there are pumps — [Donald] uses peristaltic pumps — but there’s also two Raspberry Pis, an ESP8622, and at least one more microcontroller lurking underneath. You can see a video about the device below.
Even if you don’t want a refreshing libation, you’ll probably like the VK-01’s Bladerunner cyberpunk styling. What we really enjoyed about the post was that it took you through the concept sketches, some of the design trades, and even a cardboard prototype.
 [Petar Crnjak]’s Faze4 is a open source robotic arm with 3D printable parts, inspired in part by the design of industrial robot arms. In particular, [Petar] aimed to hide wiring and cables inside the arm as much as possible, and the results look great! Just watch it move in the video below.
[Petar Crnjak]’s Faze4 is a open source robotic arm with 3D printable parts, inspired in part by the design of industrial robot arms. In particular, [Petar] aimed to hide wiring and cables inside the arm as much as possible, and the results look great! Just watch it move in the video below.