A few weeks ago, [Shane Wighton] created a basketball backboard which made it impossible to miss a shot even remotely close to the hoop. As a passive device, though, the backboard had its limits. Shots with tremendous velocity wouldn’t go in, and (like most backboards) it was missing facial recognition software. So he got to work on a second version which solves those issues, and takes a more active role in the game.
This version is flat, and looks largely unassuming until a game begins. The flat backboard is mechanized and includes a camera, so incoming shots can be analyzed in real-time while the backboard is moved into a position to direct the ball into the net. Or, since it does include facial recognition, the backboard can always send the ball away from the hoop, ensuring that [Shane] always wins basketball games no matter how many shots his opponent takes.
If you didn’t get a chance to see the original, we featured that a while back, and it’s truly a wonder when you learn about how much analysis went into creating the shape. The new version is even more impressive, doing all of that math in real time, and we can’t wait to see what [Shane] comes up with next.
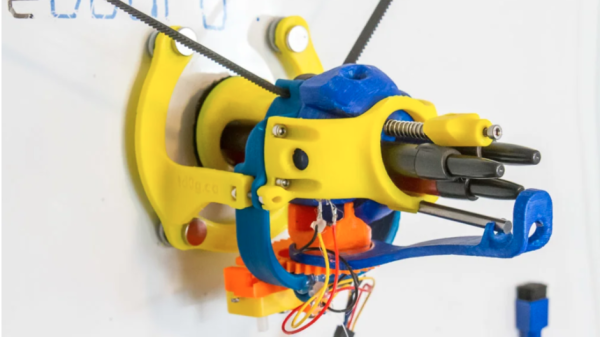

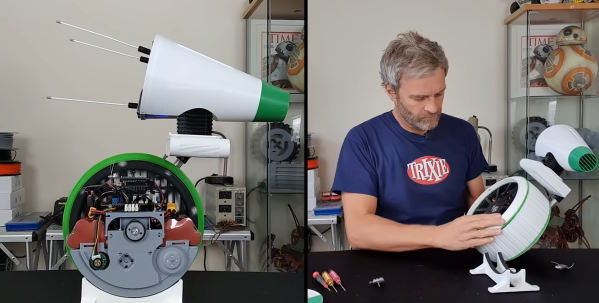
 D-O is effectively a two-wheeled self-balancing robot, with two thin drive wheels on the outer edges of the main body. A wide flexible tire covers the space between the two wheels, where the electronics are housed, without actually forming part of the drive mechanism. The main drive motors are a pair of geared DC motors with encoders to allow closed-loop control down to very slow speeds. The brains of the operation is an Arduino MKR-W1010 GET on a stack that consists of a motor driver, shield, IMU shields, and prototyping shield. [Matt] did discover a design error on the motor driver board, which caused the main power switching MOSFET to burst into flames from excessive gate voltage. Fortunately he was able to work around this by simply removing the blown MOSFET and bridging the connection with a wire.
D-O is effectively a two-wheeled self-balancing robot, with two thin drive wheels on the outer edges of the main body. A wide flexible tire covers the space between the two wheels, where the electronics are housed, without actually forming part of the drive mechanism. The main drive motors are a pair of geared DC motors with encoders to allow closed-loop control down to very slow speeds. The brains of the operation is an Arduino MKR-W1010 GET on a stack that consists of a motor driver, shield, IMU shields, and prototyping shield. [Matt] did discover a design error on the motor driver board, which caused the main power switching MOSFET to burst into flames from excessive gate voltage. Fortunately he was able to work around this by simply removing the blown MOSFET and bridging the connection with a wire.