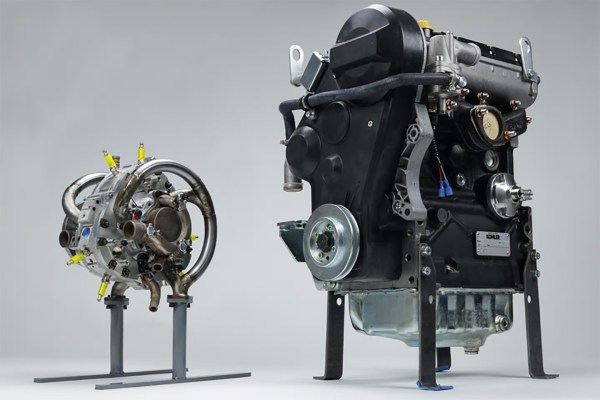
The Wankel engine seems to pop up in surprising places every so often, only to disappear into the ether before someone ultimately resurrects it for a new application and swears to get it right this time. Ultimately they come across the same problems that other Wankels suffered from, namely poor fuel efficiency and issues with reliability. They do have a surprising power-to-weight ratio and a low parts count, though, which is why people keep returning to this well, although this time it seems like most of the problems might have been solved simply by turning the entire design inside out.
A traditional Wankel engine has a triangular-shaped rotor that rotates around a central shaft inside an oval-shaped housing. This creates three chambers which continually revolve around inside the engine as the rotor spins. The seals that separate the chambers are notoriously difficult to lubricate and maintain. Instead of using a rotor inside of a chamber, this design called the X-Engine essentially uses a chamber inside of a rotor, meaning that the combustion chamber and the seals stay in fixed locations instead of spinning around. This allows for much better lubrication of the engine and also much higher efficiency. By flipping the design on its head it is able to maintain a low moving parts count, high compression ratio, and small power-to-weight ratio all while improving reliability and performance and adding the ability to directly inject fuel rather than rely on carburetion or other less-ideal methods of fuel delivery that other Wankels require.
Astute internal combustion aficionados will note that this engine is still of a two-stroke design, and thus not likely to fully eliminate the emissions problems with Wankels in a way that is satisfactory to regulators of passenger vehicles. Instead, the company is focusing on military, commercial, and aerospace applications where weight is a key driver of design. We’ve seen time and time again how the Wankel fails to live up to its promises though, and we hope that finally someone has cracked the code on one that solves its key issues.