The Fairchild Republic A-10 “Warthog” with its 30 mm rotary cannon has captured the imagination of friendly soldiers and military aviation enthusiasts on the ground for as long as it’s been flying. One such enthusiast created the Warthog Project, a fully functional A-10 cockpit for Digital Combat Simulator, that’s almost an exact copy of the real thing.
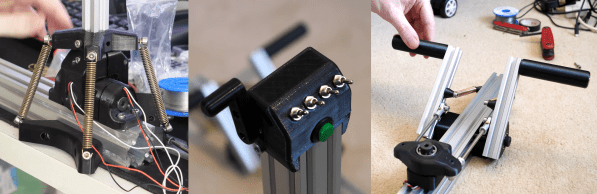
It started as a four monitor gaming cockpit, with a Thrustmaster Warthog H.O.T.A.S. The first physical instrument panels were fuel and electrical panels bought through eBay, and over time more and more panels were added and eventually moved to dedicated left and right side units. All the panels communicate with the main PC over USB, either using Arduinos or purpose-made gaming interface boards. The Arduinos take input from switches and control knobs, but also run 7-segment displays and analog dials driven by servos. The panels were all laser-cut using MDF or perspex and backlit using LEDs.
The main instrument panel is a normal monitor masked with laser-cut MDF and Thrustmaster multi-function display bezels. The cockpit is run by the open source Helios Cockpit Simulator for DCS. The main monitors were replaced by a large custom-built curved projection panel lit up by a pair of projectors. It seems this is one of those projects that is never quite finished, and small details like a compass get added from time to time. Everything is documented in detail, and all the design files are available for free if you want to build your own.
We’ve seen a few impressive simulator cockpit builds from hardcore enthusiasts over the years, including a Boeing 737, P-51 Mustang, and even a Mech cockpit for Steel Battalion. Continue reading “The Ultimate BRRRT Simulator: Fully Featured A-10 Warthog Cockpit”