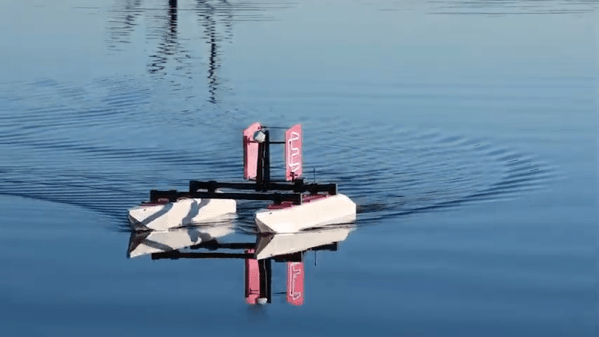
If you want to send some instruments out on the lake or the ocean, you’ll want something that floats. Sure, if you need to be underwater, or if you can fly over the water there are other options, but sometimes you want to be on the surface. For stability, it is hard to beat a catamaran — a boat with two hulls that each support one side of a deck. If that sounds like the ocean sensor platform of your dreams, try printing the one from [electrosync].
The boat looks super stable and has a brushless motor propulsion system. The design purpose is to carry environmental and water quality monitoring gear. It can hold over 5 kg of payload in the hull and there’s an optional deck system, although the plans for that are not yet included in the STL files.
You don’t have to look very hard to find another rousing success by SpaceX. It’s a company defined by big and bold moves, and when something goes right, they make sure you know about it. From launching a Tesla into deep space to the captivating test flights of their next-generation Starship spacecraft, the private company has turned high-stakes aerospace research and development into a public event. A cult of personality has developed around SpaceX’s outlandish CEO Elon Musk, and so long as he’s at the helm, we can expect bigger and brighter spectacles as he directs the company towards its ultimate goal of putting humans on Mars.
Of course, things don’t always go right for SpaceX. While setbacks are inevitable in aerospace, the company has had a few particularly embarrassing failures that could be directly attributed to their rapid development pace or even operational inexperience. A perfect example is the loss of the Israeli AMOS-6 satellite during a static fire of the Falcon 9’s engines on the launch pad in 2016, as industry experts questioned why the spacecraft had even been mounted to the rocket before it had passed its pre-flight checks. Since that costly mistake, the company has waited until all engine tests have been completed before attaching the customer’s payload.
SpaceX’s concept art for propulsive landing
But sometimes the failure isn’t so much a technical problem as an inability for the company to achieve their own lofty goals. Occasionally one of Musk’s grand ideas ends up being too complex, dangerous, or expensive to put into practice. For instance, despite spending several years and untold amounts of money perfecting the technology involved, propulsive landings for the Crew Dragon were nixed before the idea could ever fully be tested. NASA was reportedly uncomfortable with what they saw as an unnecessary risk compared to the more traditional ocean splashdown under parachutes; it would have been an impressive sight to be sure, but it didn’t offer a substantive benefit over the simpler approach.
A similar fate recently befell SpaceX’s twin fairing recovery ships Ms. Tree and Ms. Chief, which were quietly retired in April. These vessels were designed to catch the Falcon’s school bus sized payload fairings as they drifted down back to Earth using massive nets suspended over their decks, but in the end, the process turned out to be more difficult than expected. More importantly, it apparently wasn’t even necessary in the first place.
There’s a laundry list of ways that humans are polluting the earth, and even though it might not look like it from the surface, the oceans seem to bear the brunt of our waste. Some research suggests that plastic doesn’t fully degrade as it ages, but instead breaks down into smaller and smaller bits that will be somewhere the in environment for such a long time it could be characterized in layman’s terms as forever.
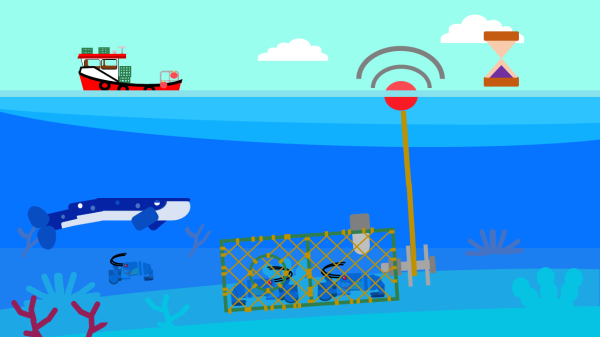
Not only does waste of all kinds make its way to the oceans by rivers or simply by outright dumping, but commercial fishing gear is estimated to comprise around 10% of the waste in the great blue seas, and one of the four nonprofits help guide this year’s Hackaday Prize is looking to eliminate some of that waste and ensure it doesn’t cause other problems for marine life. This was the challenge for the Conservation X Labs dream team, three people who were each awarded a $6,000 micro-grant to work full time for two months on the problem.
It isn’t about simply collecting waste in the ocean, but rather about limiting the time that potentially harmful but necessary fishing equipment is in the water in the first place. For this two-month challenge, this team focused on long lines used by professional fishing operations to attach buoys to gear like lobster pots or crab traps. These ropes are a danger to large ocean animals such as whales when they get tangled in them and, if the lines detach from the traps, the traps themselves continue to trap and kill marine life for as long as they are lost underwater. This “ghost gear” is harmful in many different ways, and reducing its time in the water or “soak time” was the goal for the project.
Let’s take a closer look at their work after the break, and we can also see the video report they filed as the project wrapped up.
Since the widespread manufacture of plastics began in earnest in the early 1950s, plastic pollution in the environment has become a major global problem. Nowhere is this more evident than the Great Pacific Garbage Patch. A large ocean gyre that has become a swirling vortex full of slowly decaying plastic trash, it has become a primary target for ocean cleanup campaigns in recent years.
However, plastic just doesn’t magically appear in the middle of the ocean by magic. The vast majority of plastic in the ocean first passes through river systems around the globe. Thanks to new research, efforts are now beginning to turn to tackling the issue of plastic pollution before it gets out to the broader ocean, where it can be even harder to clean up. Continue reading “Targeting Rivers To Keep Plastic Pollution Out Of The Ocean”→
Sailboats have been traversing the Atlantic Ocean since before 1592, sailing through sunshine, wind, and rain. The one thing that they’ve all had in common has been a captain to pilot the ship across this vast watery expanse, at least until now. A company called Offshore Sensing has sailed an unmanned vessel all the way from Canada to Ireland.
The ship, called the Sailbuoy, attempted the journey last year as well but only made it about halfway before the mission was abandoned. This year, however, the voyage was finally completed, and this craft is officially the first unmanned ship to cross the Atlantic Ocean. The journey took about 80 days using sails and a small set of solar panels to drive the control electronics.
Using this technology, the company can investigate wave activity in specific areas of the ocean without having to send out a manned vessel to install a permanent buoy. The sailbuoy simply uses its autonomy to stay in a particular patch of ocean. There have been other missions that the sailbuoy has been tasked with as well, such as investigating the aftermath of the Deepwater Horizon oil spill in the Gulf of Mexico. With a reliable craft like this, it becomes much easier, safer, and less expensive to explore the ocean’s surface.
As the human population continues to rise and the amount of industry increases, almost no part of the globe feels the burdens of this activity more than the oceans. Whether it’s temperature change, oxygen or carbon dioxide content, or other characteristics, the study of the oceans will continue to be an ongoing scientific endeavor. The one main issue, though, is just how big the oceans really are. To study them in-depth will require robots, and for that reason [Mike] has created an autonomous boat.
This boat is designed to be 3D printed in sections, making it easily achievable for anyone with access to a normal-sized printer. The boat uses the uses the APM autopilot system and Rover firmware making it completely autonomous. Waypoints can be programmed in, and the boat will putter along to its next destination and perform whatever tasks it has been instructed. The computer is based on an ESP module, and the vessel has a generously sized payload bay.
While the size of the boat probably limits its ability to cross the Pacific anytime soon, it’s a good platform for other bodies of water and potentially a building block for larger ocean-worthy ships that might have an amateur community behind them in the future. In fact, non-powered vessels that sail the high seas are already a reality.
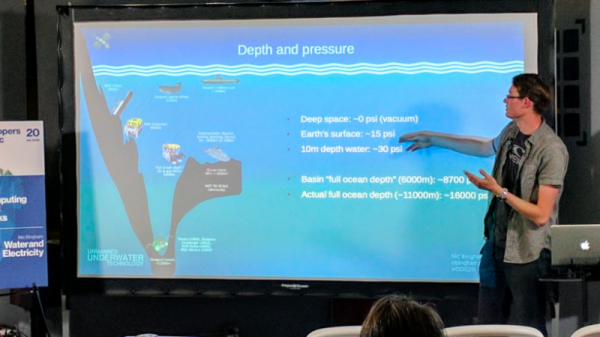
Deep-sea exploration is considered as a relatively new area of research and the electronics involved has to be special in order to survive some of the deepest parts of the ocean. Pressure Tolerant Electronics is a new subject and has its own challenges as explained by [Nic Bingham] of the Schmidt Ocean Institute.
[Nic Bingham] was one of the speakers at the Supplyframe office for ‘The Hardware Developers Didactic Galactic’ held April 20th 2017. His talks was based on his experience with ambient-pressure electronics and autonomous solar-diesel power plants at the Antarctic plateau. Due to high pressures at large depths, the selection of components becomes critical. Low density components such as electrolytic capacitors have either air or fluids which are susceptible to compression under water and prone to damage. Since pressure tolerance is not part of most datasheet figures, component selection becomes difficult and subject to prior testing.
There are other challenges as well as [Nic Bingham] explains that revolve around the procurement of special parts as well as spare for older components. In his whitepaper, [Nic Bingham] chalks out everything from the development process to different testing methodologies and even component selection for such applications.