Seeing a heavy load slide around on nearly frictionless air bearings is pretty cool; it’s a little like how the puck levitates on an air hockey table. Commercial air bearings are available, of course, but when you can build these open-source air bearings, why bother buying?
One of the nice things about [Diffraction Limited]’s design is that these bearings can be built using only simple tools. No machining is needed past what can be easily accomplished with a hand drill, thanks to some clever 3D-printed jigs that allow you to drill holes with precision into stainless steel discs you can buy on the cheap. An extremely flat surface is added to the underside of these discs thanks to another jig, some JB Weld epoxy, and a sheet of float glass to serve as an ultra-flat reference. Yet more jigs make it easy to scribe air channels into the flat surface and connect them to the air holes through a bit of plaster of Paris, which acts as a flow restriction. The video below shows the whole process and a demo of the bearings in action.
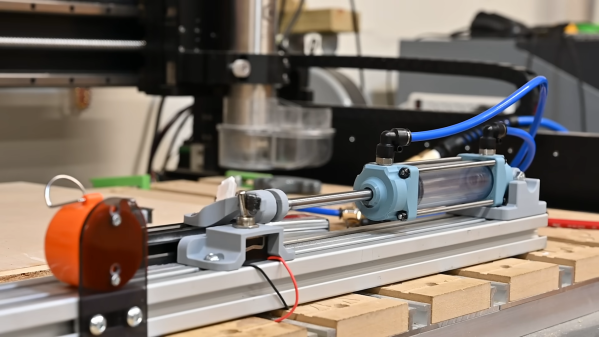
[Diffraction Limited] mentions a few applications for these air bearings, but the one that interests us most is their potential use in linear bearings; a big CNC cutter using these air bearings would be pretty cool. We seen similar budget-friendly DIY air bearings before, including a set made from used graphite EDM electrodes.