Starting this weekend, a group of 65 invited Maker’s from various disciplines, along with 20 awesome Mentors, will gather at the Maker’s Asylum in Mumbai for the five day S.T.E.A.M. Fabrikarium program. The aim is to improve the capabilities of the differently-abled by building and expanding upon existing open source projects. At the same time, the teams will learn more about rapid prototyping techniques.
Among the participants will be at least 15 differently-abled people who will be a part of the whole process of learning as well as providing their inputs on the problems being tackled. Participants have an opportunity to understand how design thinking works and work on improving the existing designs.
Participants will team up and choose from five existing open source projects:
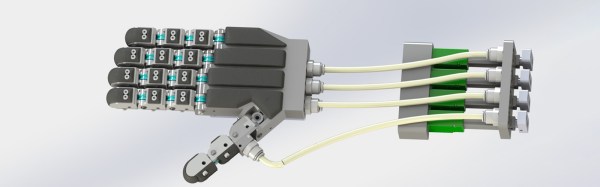
- Bionico – a myoelectric prosthesis
- Braille rap – using a 3D printer as a braille embosser.
- e-Trotti – a low-cost, removable electrical assistance for wheelchair use, made from electric scooter parts.
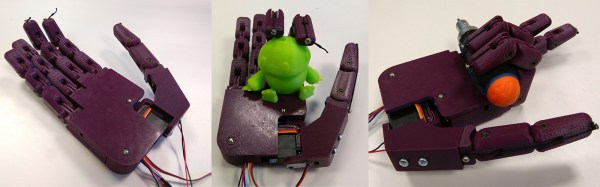
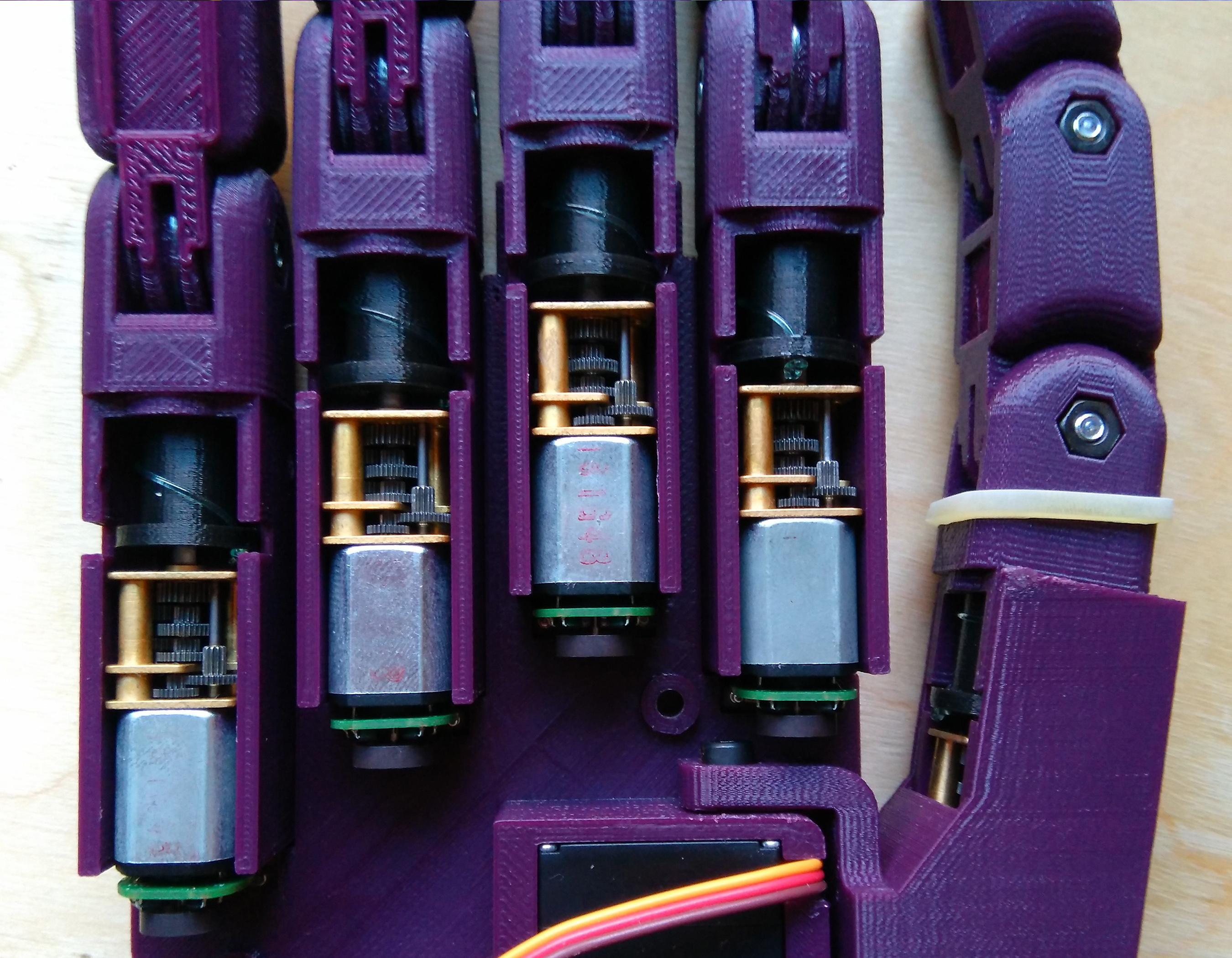
- Project Shiva – customized and beautiful upper limb prosthetics.
- Flying Wheelchair – a wheelchair specially adapted for use while paragliding.
The Asylum’s fully-fledged workshop facilities offer a wood shop, a laser cutter, a CNC, several 3D printers, electronics tools and instruments and an infectious environment that will allow the participants to learn a lot during the five short days. While working on prototyping their projects, all teams will have constant access to a team of mentors and industry experts who will help solve their problems and give guidance when necessary.
The Maker’s Asylum includes fully-fledged workshop facilities for the build process, and the team succeeded in bringing onboard a slew of industrial partners and supporters to ensure that the program can be offered to the participants for free. That is a great way to bring makerspaces, makers, and the industry together in a symbiotic program that benefits society. The program was developed in collaboration with My Human Kit, a company from France who selected the five open-source projects mentioned above. The Fabrikarium is made possible via Bonjour-India, which fosters Indo-French partnerships and exchanges.
Hackaday is proud to be a part of this program and will be present to help document all of the awesome projects. Participants will share their progress on Hackaday.io, so watch for updates over the coming week. To get an idea of what to expect at the S.T.E.A.M. Fabrikarium 2018, check out the video from an earlier version embedded below.
Continue reading “S.T.E.A.M. Fabrikarium Builds Assistive Tech In Mumbai”