Recycling is on paper at least, a wonderful thing. Taking waste and converting it into new usable material is generally more efficient than digging up more raw materials. Unfortunately though, sorting this waste material is a labor-intensive process. With China implementing bans on waste imports, suddenly the world is finding it difficult to find anywhere to accept its waste for reprocessing. In an attempt to help solve this problem, MIT’s CSAIL group have developed a recycling robot.
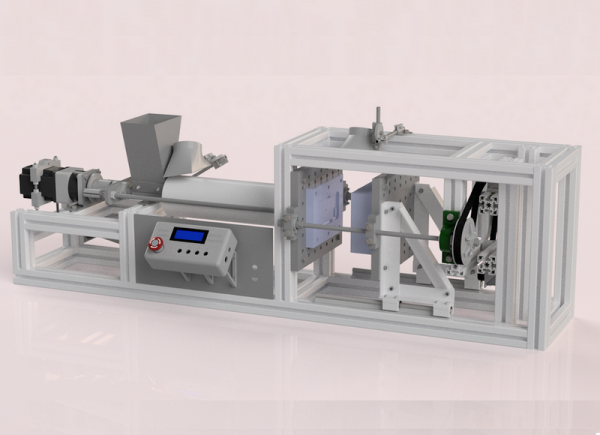
The robot aims to reduce the reliance on human sorters and thus improve the viability of recycling operations. This is achieved through a novel approach of using special actuators that sort by material stiffness and conductivity. The actuators are known as handed shearing auxetics – a type of actuator that expands in width when stretched. By having two of these oppose each other, they can grip a variety of objects without having to worry about orientation or grip strength like conventional rigid grippers. With pressure sensors to determine how much a material squishes, and a capacitive sensor to determine conductivity, it’s possible to sort materials into paper, plastic, and metal bins.
The research paper outlines the development of the gripper in detail. Care was taken to build something that is robust enough to deal with the recycling environment, as well as capable of handling the sorting tasks. There’s a long way to go to take this proof of concept to the commercially viable stage, but it’s a promising start to a difficult resource problem.
MIT’s CSAIL is a hotbed of interesting projects, developing everything from visual microphones to camoflauge for image recognition systems. Video after the break.
Continue reading “This Bot Might Be The Way To Save Recycling” →





 your magic smoke. Even if you are lucky, stray parts are the root of boundless malfunctions from disruptive to deadly. [TheRainHarvester] shares his trick for
your magic smoke. Even if you are lucky, stray parts are the root of boundless malfunctions from disruptive to deadly. [TheRainHarvester] shares his trick for 










