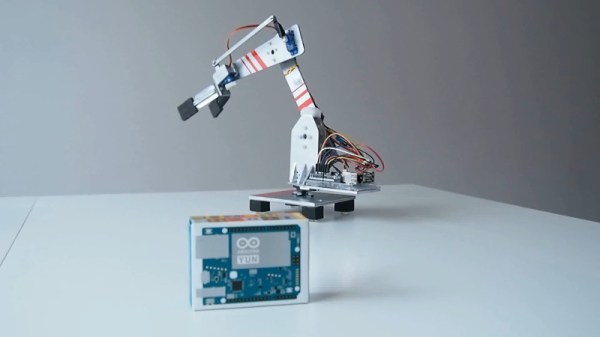
Dexter, a really great robot arm project, just won top honors in the 2018 Hackaday Prize, and walked away with $50,000 toward continuing their project. As a hat tip to Hackaday and the community, Haddington Dynamics, the company behind Dexter, agreed to open-source their newest version of Dexter as well. As James Newton said when accepting the trophy during the award ceremony, “because of your faith in us, because of this award, we have been moved to open-source the next generation of Dexter.” Some very clever work went into producing Dexter, and we can’t wait to see what further refinements have been made!
Dexter isn’t the only robotic arm in town, by any means. But in terms of hobbyist-level robotics, it’s by far the most complete robot arm that we’ve seen, and it includes a couple of design features that make both its positional accuracy and overall usability stand out above the rest. This is a robot arm with many of the bells and whistles of a hundred-thousand dollar robot, but on a couple-thousand dollar budget. Continue reading “An In-Depth Look At Dexter, The Robotic Arm”


 That’s where [Andy Forest] comes in with the
That’s where [Andy Forest] comes in with the