[Matt Vella] has had a talking, non-posable skeleton knocking around for years. As cool as that sounds, [Matt] is really tired of its three stock phrases. Fast forward to this year — [Matt] got a posable skeleton and decided to go all out on this, the hackiest of all holidays. The result? Hack Skellington.
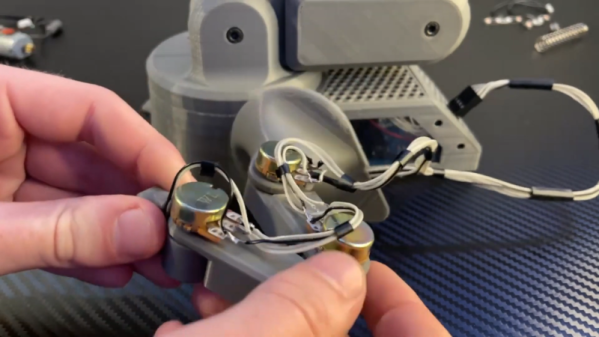
 Between the eye socket-mounted camera, the speaker, and servos in the head, jaw, and one arm, Hack Skellington is decked out to scare trick-or-treaters (or anyone who gets close enough) in modern fashion. Thanks to ChatGPT and an AI-generated voice, Hack can recognize people and welcome them by name, look people in the eye, or simply move its arm when someone gets too close.
Between the eye socket-mounted camera, the speaker, and servos in the head, jaw, and one arm, Hack Skellington is decked out to scare trick-or-treaters (or anyone who gets close enough) in modern fashion. Thanks to ChatGPT and an AI-generated voice, Hack can recognize people and welcome them by name, look people in the eye, or simply move its arm when someone gets too close.
The brains of this operation is a Radxa Zero SBC programmed in Viam, though any SBC with Wi-Fi, GPIO, I²C, and USB should work just fine. [Matt] only spent about $150 total, half of which went to the skeleton itself. Be sure to check the spooky action out after the break.
You have until 9 AM PT on Tuesday, October 31st to enter the 2023 Halloween Hackfest. Procrastinators unite! Don’t want to animate a whole skeleton? Come to think of it, a severed, animated hand is even creepier, anyway.
Continue reading “2023 Halloween Hackfest: Hack Skellington Is The Life Of The Party”


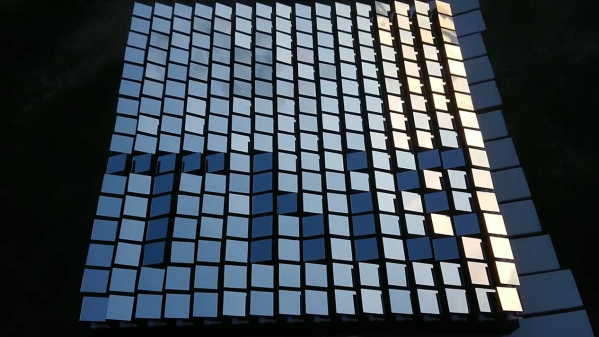



 probed per run, but however it works it produces some interesting, almost random results. The premise is that the point-to-point surface resistivity is unpredictable due to the chaotically formed crystals all jumbled up, but somehow uses these measured data to generate some waveshapes vaguely reminiscent of the resistivity profile of the sample, the output of which is then fed into a sound synthesis application and pumped out of a speaker. It certainly looks fun.
probed per run, but however it works it produces some interesting, almost random results. The premise is that the point-to-point surface resistivity is unpredictable due to the chaotically formed crystals all jumbled up, but somehow uses these measured data to generate some waveshapes vaguely reminiscent of the resistivity profile of the sample, the output of which is then fed into a sound synthesis application and pumped out of a speaker. It certainly looks fun.