Buildings currently consume about 50% of the world’s electricity, so finding ways to reduce the loads they place on the grid can save money and reduce carbon emissions. Scientists at the University of Toronto have developed an “optofluidic” system for tuning light coming into a building.
The researchers devised a biomimetic system inspired by the multi-layered skins of squid and chameleons for active camouflage to be able to actively control light intensity, spectrum, and scattering independently. While there are plenty of technologies that can regulate these properties, doing so independently has been too complicated a task for current window shades or electrochromic devices.
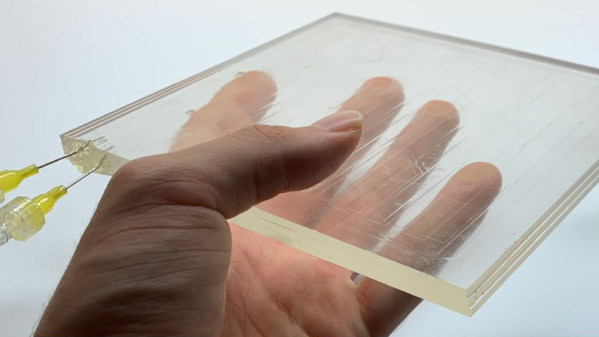
To make the prototype devices (15 × 15 × 2 cm), 3 mm PMMA sheets were stacked after millifluidic channels (1.5 mm deep and 6.35 mm wide) were CNC milled into the sheets. Fluids could be injected and removed by needles glued into the ends of the channels. By using different fluids in the channels, researchers were able to tune various aspects of the incoming light. Scaled up, one application of the system could be to keep buildings cooler on hot days without keeping out IR on colder days which is one disadvantage of static window coatings currently in use.
If you want to control some of the light going OUT of your windows, maybe you should try building this smart LED curtain instead?
Continue reading “Biomimetic Building Facades To Reduce HVAC Loads”