so what has technology done for you lately? nothing? well, my friend, today we have a hack that will change your life forever. today sammo sent us a link to jp brown’s amazing rubick’s cube solving robot.
the final task on my big list of things to do can finally be crossed off. life is good.
Some readers may recall building a line-following robot during their school days. Involving some IR LEDs, perhaps a bit of LEGO, and plenty of trial-and-error, it was fun on a tiny scale. Now imagine that—but rideable. That’s exactly what [Austin Blake] did, scaling up a classroom robotics staple into a full-size vehicle you can actually sit on.
The robot uses a whopping 32 IR sensors to follow a black line across a concrete workshop floor, adjusting its path using a steering motor salvaged from a power wheelchair. An Arduino Mega Pro Mini handles the logic, sending PWM signals to a DIY servo. The chassis consists of a modified Crazy Cart, selected for its absurdly tight turning radius. With each prototype iteration, [Blake] improved sensor precision and motor control, turning a bumpy ride into a smooth glide.
The IR sensor array, which on the palm-sized vehicle consisted of just a handful of components, evolved into a PCB-backed bar nearly 0.5 meters wide. Potentiometer tuning was a fiddly affair, but worth it. Crashes? Sure. But the kind that makes you grin like your teenage self. If it looks like fun, you could either build one yourself, or upgrade a similar LEGO project. Continue reading “Honey, I Blew Up The Line Follower Robot”→
You’d think a paper from a science team from Carnegie Mellon would be short on fun. But the team behind LegoGPT would prove you wrong. The system allows you to enter prompt text and produce physically stable LEGO models. They’ve done more than just a paper. You can find a GitHub repo and a running demo, too.
The authors note that the automated generation of 3D shapes has been done. However, incorporating real physics constraints and planning the resulting shape in LEGO-sized chunks is the real topic of interest. The actual project is a set of training data that can transform text to shapes. The real work is done using one of the LLaMA models. The training involved converting Lego designs into tokens, just like a chatbot converts words into tokens.
There are a lot of parts involved in the creation of the designs. They convert meshes to LEGO in one step using 1×1, 1×2, 1×4, 1×6, 1×8, 2×2, 2×4, and 2×6 bricks. Then they evaluate the stability of the design. Finally, they render an image and ask GPT-4o to produce captions to go with the image.
The most interesting example is when they feed robot arms the designs and let them make the resulting design. From text to LEGO with no human intervention! Sounds like something from a bad movie.
We wonder if they added the more advanced LEGO sets, if we could ask for our own Turing machine?
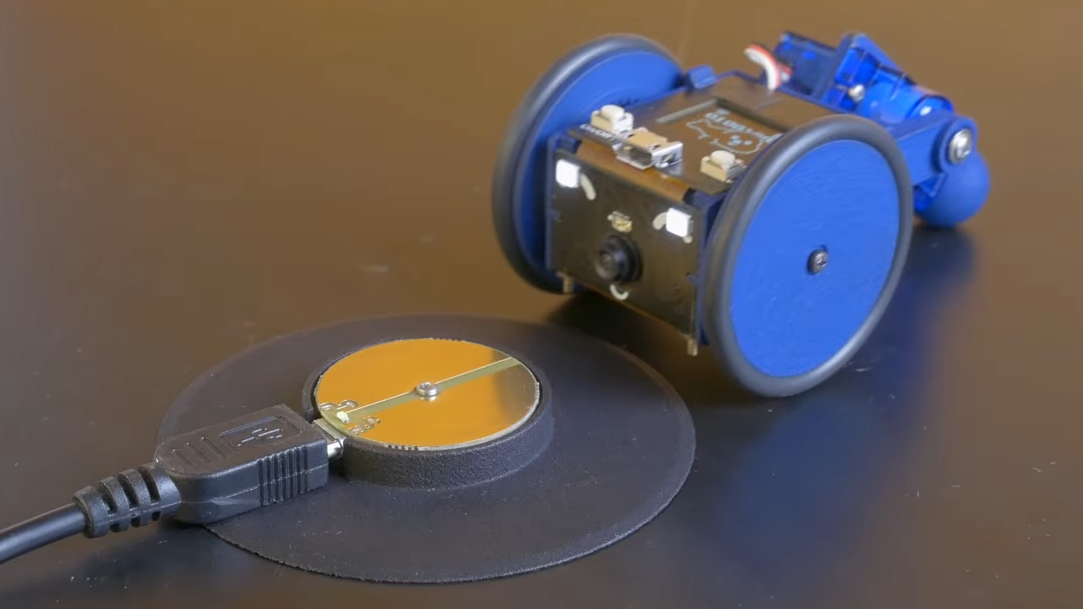
[Charmed Labs] are responsible for bringing numerous open-source hardware products to fruition over the years, and their latest device is an adorably small robotic camera platform called Goby, currently crowdfunding for its initial release. Goby has a few really clever design features and delivers a capable (and hackable) platform for under 100 USD.
Goby embraces its small size, delivering what its creators dub “tinypresence” — or the feeling of being there, but on a very small scale. Cardboard courses, LEGO arenas, or even tabletop gaming scenery hits different when experienced from a first-person perspective. Goby is entirely reprogrammable with nothing more than a USB cable and the Arduino IDE, while costing less than most Arduino starter kits.
Recharging happens by driving over the charger, then pivoting down so the connectors (the little blunt vampire fangs under and to each side of the camera) come into contact with the charger.
One of the physical features we really like is the tail-like articulated caster at the rear. Flexing this pivots Goby up or down (and can even flip Goby completely over), allowing one to pan and tilt the view without needing to mount the camera on a gimbal. It also comes into play for recharging; Goby simply moves over the disc-shaped charger and pivots down to make contact.
At Goby‘s heart is an ESP32-S3 and OmniVision OV2640 camera sensor streaming a live video feed (and driving controls) with WebRTC. Fitting the WebRTC stack onto an ESP32 wasn’t easy, but opens up possibilities beyond just media streaming.
Goby is set up to make launching an encrypted connection as easy as sharing a URL or scanning a QR code. The link is negotiated between bot and client with the initial help of an external server, and once a peer-to-peer connection is established, the server’s job is done and it is out of the picture. [Charmed Labs]’s code for this functionality — named BitBang — is in beta and destined for an open release as well. While BitBang is being used here to make it effortless to access Goby remotely, it’s more broadly intended to make web access for any ESP32-based device easier to implement.
As far as tiny remote camera platforms go, it might not be as small as rebuilding a Hot Wheels car into a micro RC platform, but it’s definitely more accessible and probably cheaper, to boot. Check it out at the Kickstarter (see the first link in this post) and watch it in action in the video, embedded just below the page break.
If you want to get started in microfluidic robotics, [soiboi soft’s] salamander is probably too complex for a first project. But it is impressive, and we bet you’ll learn something about making this kind of robot in the video below.
The pneumatic muscles are very impressive. They have eight possible positions using three sources of pressure. This seems like one of those things that would have been nearly impossible to fabricate in a home lab a few decades ago and now seems almost trivial. Well, maybe trivial isn’t the right word, but you know what we mean.
The soft robots use layers of microfluidic channels that can be made with a 3D printer. Watching these squishy muscles move in an organic way is fascinating. For right now, the little salamander-like ‘bot has a leash of tubes, but [soiboi] plans to make a self-contained version at some point.
Rope-climbing robots are the stuff of engineering dreams. As kids, didn’t we all clutter our family home with constructions of towers and strings – Meccano, or Lego – to have ziplines spanning entire rooms? Good for the youngsters of today, this has been included in school curricula. At the University of Illinois, the ME 370 students have been given the task of building a robot that can hang from a rope and walk across it—without damaging the rope. The final projects show not only how to approach tricky design problems, but also the creative solutions they stumbled upon.
Imagine a tiny, rope-climbing walker in your workshop—what could you create?
The project is full of opportunities for those thinking out of the box. It’s all about the balance between innovation and practicality: the students have to come up with a solution that can move at least 2 meters per minute, fits in a shoebox, and has some creative flair—no wheels allowed! The constraints provide an extra layer of challenge, but that’s where the fun lies. Some students use inverted walkers, others take on a more creature-like approach. The clever use of motors and batteries shows just how far simple tech can go when combined with a bit of engineering magic.
This project is a fantastic reminder that even small, seemingly simple design challenges can lead to fascinating creations. It invites us adults to play, and by that, we learn: a win-win situation. You can find the original article here, or grab some popcorn and watch the video below.
Human hands are remarkable pieces of machinery, so it’s no wonder many robots are designed after their creators. The amount of computation required to properly attenuate the grip strength and position of a hand is no joke though, so what if you took a tentacular approach to grabbing things instead?
Inspired by ocean creatures, researchers found that by using a set of pneumatically-controlled tentacles, they could grasp irregular objects reliably and gently without having to faff about with machine learning or oodles of sensors. The tentacles can wrap around the object itself or intertwine with each other to encase parts of an object in its gentle grasp.
The basic component of the device is 12 sections “slender elastomeric filament” which dangle at gauge pressure, but begin to curl as pressure is applied up to 172 kPa. All of the 300 mm long segments run on the same pressure source and are the same size, but adding multiple sized filaments or pressure sources might be useful for certain applications.

![[Austin Blake] sitting on line follower cart in garage](https://hackaday.com/wp-content/uploads/2025/05/line-follower-1200.jpg?w=600&h=450)
















{kind=link}