Stepper motors are great for projects that require accurate control of motion. 3D printers, CNC machines and plotters are often built using these useful devices. [InventorArtist] built a stepper-based cycloid drawing machine, and made use of a nifty little hack along the way.
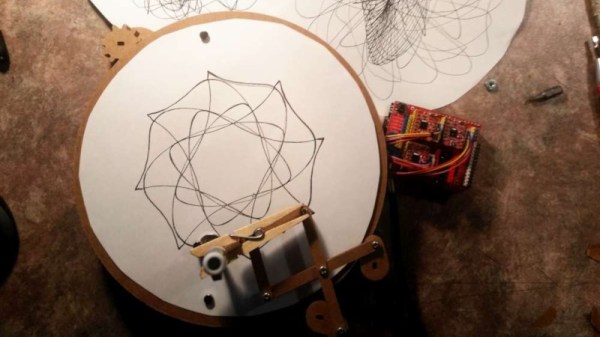
 The machine uses a rotating turntable to spin a piece of drawing paper. A pen is then placed in a pantograph mechanism, controlled by another two stepper motors. The build uses the common 28BYJ-48 motor, which are a unipolar, 5-wire design. A common hack is to open these motors up and cut a trace in order to convert them to bipolar operation, netting more torque at the expense of being more complex to drive. [InventorArtist] worked in collaboration with [Doug Commons], who had the idea of instead simply drilling a hole through the case of the motor to cut the trace. This saves opening the motor, and makes the conversion a snap.
The machine uses a rotating turntable to spin a piece of drawing paper. A pen is then placed in a pantograph mechanism, controlled by another two stepper motors. The build uses the common 28BYJ-48 motor, which are a unipolar, 5-wire design. A common hack is to open these motors up and cut a trace in order to convert them to bipolar operation, netting more torque at the expense of being more complex to drive. [InventorArtist] worked in collaboration with [Doug Commons], who had the idea of instead simply drilling a hole through the case of the motor to cut the trace. This saves opening the motor, and makes the conversion a snap.
[InventorArtist] was able to create a machine capable of beautiful spirograph drawings, and develop a useful hack along the way. Reports are that a jig is in development to make the process foolproof for those keen to mod their own motors. We expect to see parts up on Thingiverse any day now. We’ve also covered the basic version of this hack before.
[Thanks to Darcy Whyte for the tip!]