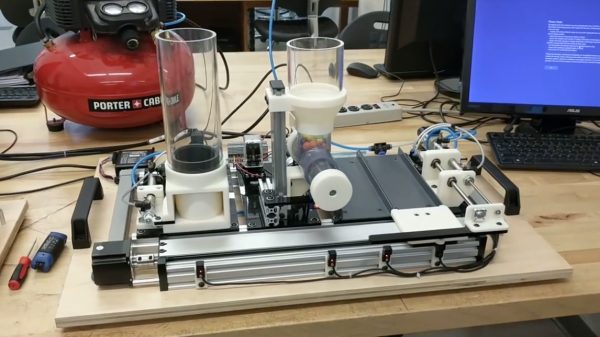
A lot can be done with simple motors and linear motion when they are mated to the right mechanical design and control systems. Teaching these principles is the goal behind the LCMT (Low Cost Mechatronics Trainer) which is intended primarily as an educational tool. The LCMT takes a “learn by doing” approach to teach a variety of principles by creating a system that takes a cup from a hopper, fills it with candy from a dispenser, then sorts the cups based on color, all done by using the proper combinations of relatively simple systems.
The Low Cost Mechatronics Trainer can be built for under $1,000 and is the wonderful work of a team from the Anne Arundel Community College in Maryland, USA. The LCMT is clearly no one-off project; there are complete CAD files and build documentation on the site, as well as a complete lab guide for educators.
A demo video of the assembled system is embedded below, with a walkthrough done by [Tim Callinan]. It’s worth a watch to see how cleanly designed the system is, and the visual learners among you may learn a thing or two just by watching the system go through its motions.
Continue reading “Watch The Low-Cost Mechatronics Lab Dispense Candy, Sort Cups”