Robot arms and grippers do important work every hour of every day. They’re used in production lines around the world, toiling virtually ceaselessly outside of their designated maintenance windows.
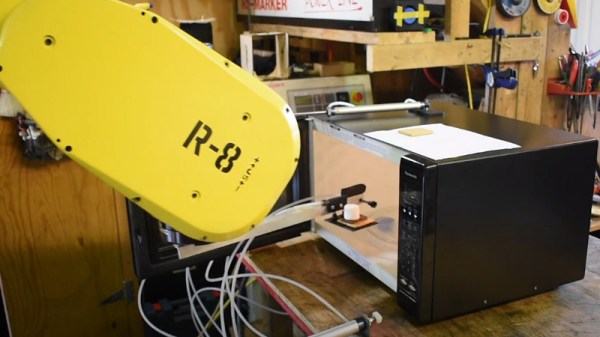
It’s summer time in the Northern Hemisphere, and that means campfires for cooking hot dogs, keeping the mosquitoes away, and of course, making s’mores. For our far-flung friends, that’s a fire roasted marshmallow and a square of chocolate smashed between two graham crackers. So called because when you’re done, you’ll want s’more. It’s an easy enough recipe that any child can tell you how to make it. But what if you’re not a child? What if you don’t even have hands, because you’re an industrial robot? This is the challenge that [Excessive Overkill] has taken on in the video below the break.
Starting with a Fanuc S-420 i W industrial robot built in 1997, [Excessive Overkill] painstakingly taught his own personal robot how to make S’Mores. Hacking the microwave with pneumatic cylinders to get the door open was a nice touch, and so are the vacuum grippers at the business end of the S’More-bot.
We know, we said you were supposed to make them on a campfire — but who wants to risk cooking their vintage robotic arm just to melt some chocolate?
There’s a lot of story behind this hack, and [Excessive Overkill] explains how they acquired, transported, and three phase powered an out of date industrial robot in another of their videos. Of course, this is Hackaday so it’s a subject that’s come up before in the reverse engineering of an industrial robot that we covered some time back.
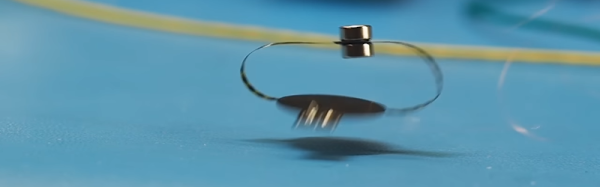
We’ve noticed that [Carl Bugeja] likes flexible PCBs. His latest exploit is to make PCB-based springs that combine with some magnets to create little devices that jump. We aren’t sure what practical use these might have, but they are undeniably novel and you can see them — um — jumping around, in the video, below.
[Carl] did many experiments with the spring construction and design. You can see several of the iterations in the video, not all of which worked out well. A PCB coil in the base becomes magnetized when current flows and this repels or attracts the magnets at the other end of the spring. What can you do with a PCB spring? We aren’t sure. Maybe this is how your next microrobot could climb stairs?
Adding stiffeners produced springs too stiff for the electromagnet to attract. We wondered if a different coil design at the base might be more effective. For that matter, you might not have to use a flat PCB coil in that position if you were really wanting to optimize the jumping behavior.
[James Bruton] is on a quest to explore all the weird and wonderful methods of robot locomotion, and in his latest project created an omnidirectional walker that can move in any direction instantaneously.
The walker actually makes use of three independent four-legged Strider mechanisms, connected in a triangle at 120deg. Wheels are attached to the bottom of each leg, oriented at a right angle to the leg’s plane of motion to allow the foot to slide. Varying the relative speed and direction of each of the mechanisms lets the robot move in any direction, similar to his ball-wheeled robot. Each strider mechanism uses a single motor and looks similar to Strandbeest walkers, but it lifts its feet to traverse rougher terrain. [James] demonstrates this with some obstacles, and found that moving in such an orientation that all three sets of legs provide the best results.
[James] planes to build a larger rideable version, but we think he should mount a chest of Sapient Pearwood to carry all his stuff and name it The Luggage.
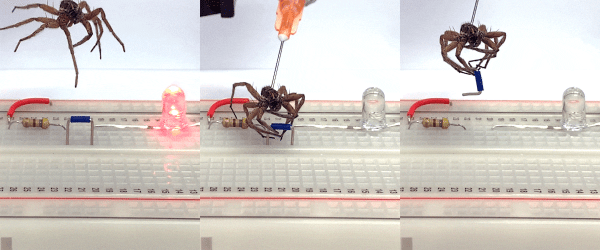
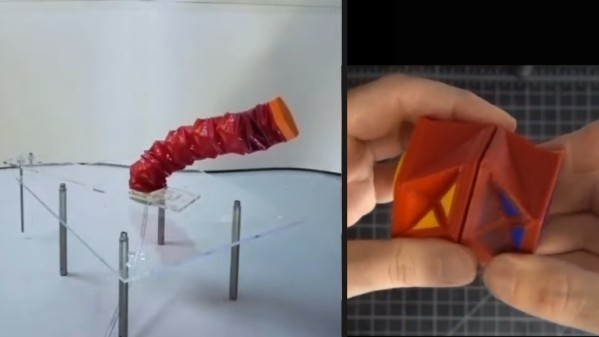
The key is a modified design based on the Kresling pattern, with each actuator having a specially-designed section (the colored triangles in the image above) that are designed to pop out under a certain amount of positive pressure, and remain stable after it has done so. This section holds its shape until a certain amount of negative pressure is applied, and the section pops back in.
Whether or not this section is popped out changes the actuator’s shape, therefore changing the way it deforms. This makes a simple actuator bi-stable and capable of different movements, using only a single pressure source. Stack up a bunch of these actuators, and with careful pressure control, complex movements become possible. See it in action in two short videos, embedded just below the page break.
[Maurizio] built a robot arm, which is always a great accomplishment. But his project includes a very cool touch interface for an Android device that sets it apart from many other similar projects.You can see a very fast summary of the construction in the video below.
The design uses Fusion 360 and there are good explanations of each step in the process. The gripper is adapted from an existing design. Various 3D printed parts make up the wrist, shoulder, elbow, and rotating base.
It started with [CHORL] making a promise to himself regarding constructing a new combat robot: no spending of money on the new robot.
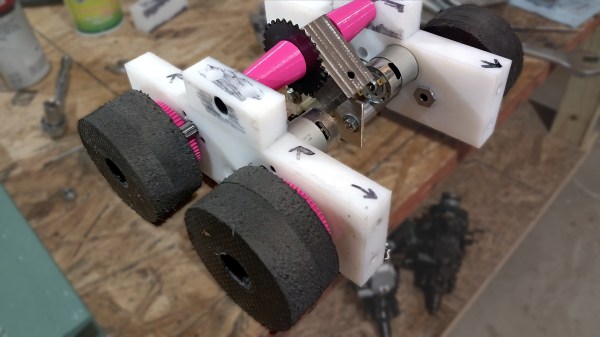
That rule was violated (but only a little) by making his robot’s wheels out of EVA kneeling pads. EVA (Ethylene-Vinyl Acetate) is a closed-cell foam that makes for durable yoga mats, kneeling pads, and products of a similar nature. [CHORL] found a way to turn them into light but serviceable wheels for his robot: the Susquehanna Boxcar.
Nested hole saws create concentric holes. Perfect for wheels.
Here’s how the wheels were made: [CHORL] began with two hole saws. Nesting a smaller hole saw into a larger one by putting both on the same arbor created a saw with two holes, both of which were centered with respect to one another. The only problem was that this hole saw was not actually deep enough to cut completely through the thick foam. Luckily, cutting roughly halfway through on one side, then flipping the sheet over and cutting through from the other side was a good workaround. That took care of turning the thick foam sheet into round wheels.
A 3D-printed part served as a wheel hub as well as gear for the drivetrain. We want to call attention to the clever method of reinforcing the connection between the parts. [CHORL] didn’t want to just glue the geared hub directly to the surface of the foam wheel, because he suspected it might separate under stress. To address this, he designed six slots into the hub, cut matching slots into the foam wheel, and inserted six spline-like reinforcements in the form of some ABS strips he had on hand. Gluing it all together with E-6000 and leaving it to cure overnight under a weight resulted in a geared wheel assembly that [CHORL] judged to be about as round and rigid as a wheel should be, so the robot had a solution for nice light wheels that were, above all, cheap!
Lots of robots need wheels, and unsurprisingly, DIY solutions are common projects. [CHORL]’s approach here looks pretty scalable, as long as one can cut some accurate holes.
Interested in knowing more about the robot these wheels are destined for? [CHORL]’s still working on the Susquehanna Boxcar, but it’s almost done, and you can read a bit more about it (and see a few more pictures) here.