It’s always good to welcome a new hackerspace to the fold, and thus we’re pleased to hear about the upcoming opening of Hackerspace Drenthe, on the north-eastern edge of the Netherlands. Starting a new space during a global pandemic is something of a feat. As part of their opening something is required to demonstrate a robot for the curious public, and what could be more accessible than a robot arm playing tic-tac-toe!
It would be correct to say that a robot moving blocks with precision is not necessarily a ground-breaking achievement, but in its purpose of providing eye-candy for a hackerspace opening while also serving as an experiment for some of the students from the school adjacent to the space it is a success. The interface is a pleasingly retro War Games style terminal, and the software is written in Python. For the curious all can be found on a GitHub repository, and should you be in that region of Europe you can find Hackerspace Drenthe in the Netherlands border town of Coevorden and attend their opening on the 2nd of April.
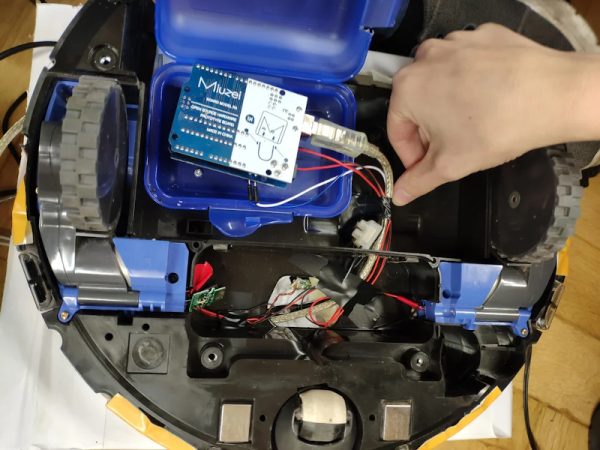
There are several projects you can imagine where it would be useful to have a robot follow you. For example, we’ve always wanted luggage that would trail us at the airport and we’ve seen several coolers that will follow you. [Madmax95] apparently dream of having a medical cart following a patient, though, and that’s good too. But how do you do it? [Max’s] method was to strip down a Roomba and build a work table and electronics on it. An Arduino controls the motor and communicates with a PC. The PC reads video from a Kinect camera on the robot and uses special tracking software to follow the patient.
We could easily imagine all of this project except the tracking. That depended on a service called Nuitrack. There is a free version that only works for 3 minutes, but it costs if you want to use it practically. However, it would still be cheaper than rolling your own if your time has value.
[Peng Zhihui] seems to have found some spare time and energy to crack out another sweet robot build, this time it’s a much smaller, and cuter emoji-bot (Original GitHub Link,) with the usual production-ready levels of attention to detail. With a lot of fine details in the 3D printed models, this is one for SLS printing in nylon, but that can be done for a reasonable outlay, in China at least. The electronics package consists of a few full custom, and tiny, PCBs designed with Altium Designer, with off-the-shelf modules for the circular LCD and camera. The main board hosts an STM32F405 and deals with the display and SD card, The reason for this choice of STM32 was due to the requirement for connecting to an external USB3300 high-speed USB PHY. There is a sensor PCB which handles the gesture sensor, a USB hub, MPU6050 9-axis sensor, and also the USB camera module. This board attaches to the USB-C connector in the base, via a FFC cable, allowing the robot to rotate on its base.
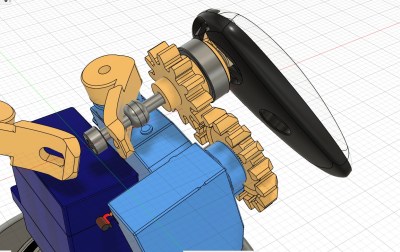
Cunning two-servo shoulder mechanism
[Peng] clearly has exacting standards as to how things should work, and we guess wanted to have the arms back-driveable in a way that enabled the host computer to track and record the motor positions for replaying later on. The connection back to the controller is via I2C, allowing all five servos to hang on the same bus, saving previous resources. Smart! Getting a processor and motor driver in such a tiny space was a bit of challenge, but a walk in the park for [Peng] as is demonstrates in the video embedded below (We believe English subtitles are pending!) The arm mechanism is particularly interesting, and rather elegantly executed, and he does seem rather proud of this part of the design, and so he should! Like with [Peng’s] other projects, there is a lot to see, and plenty of scope for feature explosion. It was nice to see the ‘bot being used as an input device, not only with gesture sensing via the dedicated sensor, but also using the camera with OpenCV to track user posture and act accordingly. This thing could act as genuinely useful AI device, as was a being darn cute at the same time!
Farming is a challenge under even the best of circumstances. Almost all conventional farmers use some combination of tillers, combines, seeders and plows to help get the difficult job done, but for those like [Taylor] who do not farm large industrial monocultures, more specialized tools are needed. While we’ve featured the Acorn open source farming robot before, it’s back now with new and improved features and a simulation mode to help rapidly improve the platform’s software.
The first of the two new physical features includes a fail-safe braking system. Since the robot uses electric geared hub motors for propulsion, the braking system consists of two normally closed relays which short the motor leads in emergency situations. This makes the motors see an extremely high load and stops them from turning. The robot also has been given advanced navigation facilities so that it can follow custom complex routes. And finally, [Taylor] created a simulation mode so that the robot’s entire software stack can be run in Docker and tested inside a simulation without using the actual robot.
For farmers who are looking to buck unsustainable modern agricultural practices while maintaining profitable farms, a platform like Acorn could be invaluable. With the ability to survey, seed, harvest, and even weed, it could perform every task of larger agricultural machinery. Of course, if you want to learn more about it, you can check out our earlier feature on this futuristic farming machine.
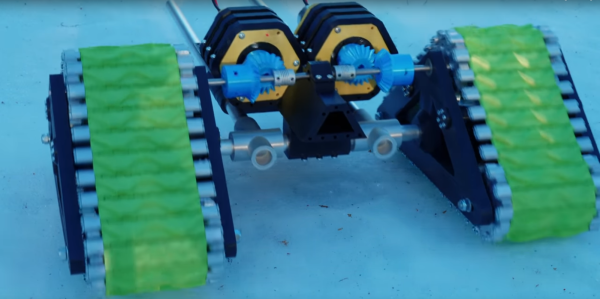
While wheels might seem like a foundational technology, they do have one major flaw: they typically need maintained roads in order to work. Anyone who has experience driving a Jeep or truck off-road likely knows this first-hand. For those with extreme off-road needs the track is often employed. [Let’s Print] is working on perfecting his RC tracked vehicle to take advantage of these perks using little more than 3D printed parts and aluminum stock.
This vehicle doesn’t just include the 3D printed tracks, but an entire 3D printed gearbox and drivetrain to drive them. Each track is driven by its own DC motor coupled to a planetary gearbox to give each plenty of torque to operate in snow or mud. The gearbox is mated to a differential which currently shares a shaft, which means that steering is currently not possible. The original plan was to have each motor drive the tracks independently but a small mistake in the build meant that the shaft needed to be tied together. [Let’s Print] has several options to eventually include steering, including an articulating body or redesigning the drivetrain to be able to separate the shaft.
While this vehicle currently has no wheels in order to improve traction, [Let’s Print] does point out that a pair of wheels could complement this vehicle when he finished the back half of it since wheels have a major advantage over tracks when it comes to steering. A vehicle with both could have the advantages of both, so we’re interested to see where this build eventually goes.
Traditionally, when it comes to high-tech self-assembling microscopic structures for use in medicine delivery, and refined, delicate grippers for robotics, there’s been a dearth of effective, economical options. While some options exist, they are rarely as effective as desired, with microscopic medicine delivery mechanisms, for example, not having the optimal porosity. Similarly, in so-called soft robotics, many compromises had to be made.
A promising technology here involves the manipulation of flat structures in a way that enables them to either auto-assemble into 3D structures, or to non-destructively transform into 3D structures with specific features such as grippers that might be useful in both micro- and macroscopic applications, including robotics.
Perhaps the most interesting part is how much of these technologies borrow from the Japanese art of origami, and the related kirigami.
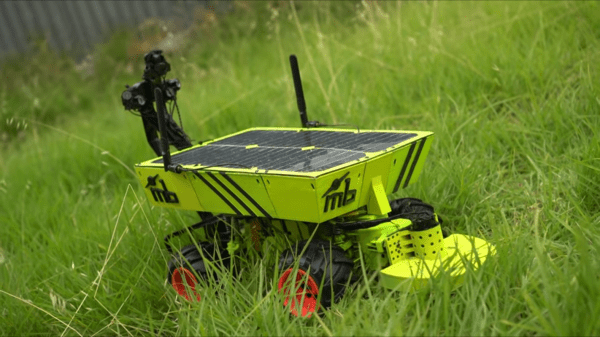
Interfacing technology and electronics with the real world is often fairly tricky. Complexity and edge cases work their way in to every corner of a project like this; just ask anyone who has ever tried to operate a rover on Mars, make a hydroponics garden, or build almost any robotics project. Even those of us who simply own a consumer-grade printer are flummoxed by the ways in which they can fail when manipulating single sheets of paper. This robotic lawnmower is no exception, driving its creator [TK] to extremes to get it to mow his lawn.
[TK] actually had a platform for his autonomous mower ready to go thanks to a previous build using this solar-powered robot to explore the Australian outback. Adding another motor to handle the grass trimming seemed simple at first and he set about wiring it all up and interfacing it to the robot. After the first iteration he found the robot was moving too fast to effectively cut the grass, so he added a more powerful cutting motor and a gearbox to help the mower crawl more slowly over the lawn. Disaster struck when his 3D printed mount for the steel cutting blades shattered, but with [TK] uninjured he pushed on with more improvements.
As it stands right now, the mower can effectively cut the grass moving forward even with the plastic-only cutting blades that [TK] is using now for safety reasons. The mower stripped its reverse gear so there still are some improvements to make before this robot is autonomously cutting the lawn without supervision. Normally we see lawnmowers retrofitted with robotics rather than robotics retrofitted with a lawnmower, but we’re excited to see any approach that lets us worry about one less household chore.