Building a robot arm is fun, but no longer the challenge it once was. You can find lots of plans and kits, and driving the motors is a solved problem. However, there is always one decision you have to make that can be a challenge: what effector to put on the end of it. If you are [MertArduino] the answer is to put suction at the end. If you need to grab the right things, this could be just the ticket for reliably lifting and letting go. You can see a video of the arm in action, below.
The arm itself is steel with four servo motors and comes in a kit. The video shows the arm making a sandwich under manual control. We suspect he might have put it under Arduino control but there’s no sudo for making sandwiches.
We’re certainly familiar with vacuum grabbers used in manufacturing to pick items up, but this is a bit different. [James Wigglesworth] sent in some renders and demo video (embedded after the break) of the Dexter robot arm and a laser cutter automatically producing face shields.
It’s a nice little bit of automation, where you can see a roll of plastic on the right side of the Glowforge laser cutter feeding into the machine. Once the laser does its thing, the the robot arm reaches in and grabs the newly cut face shield and stacks it in a box neatly for future assembly. There are a lot of interesting parts here, but the fact that the vacuum grabber is doing it’s job without a vacuum air supply is the one we have our eye on.
The vacuum comes from a corrugated sleeve that makes up the suction cup on the end of the robot arm. A rubber band holds a hinged piece over a valve on that sleeve that can be opened or closed by a servo motor. When the cuff is compressed against the face shield, the servo closes the valve, using the tape as a gasket, and the corrugated nature of the cuff creates a vacuum due to the weight of the item it is lifting. This means you don’t need a vacuum source plumbed into the robot, just a wire to power the servo.
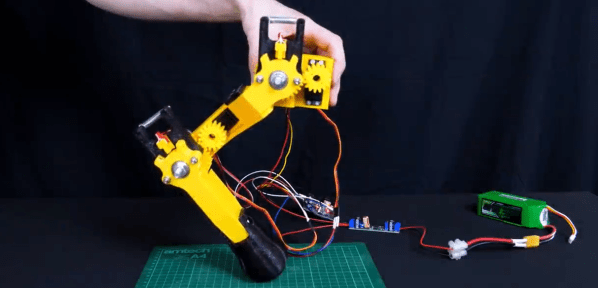
We all think we could use a third arm from time to time, but when we actually play this thought experiment out in our heads we’ll eventually come to the same hurdle [caltadaniel] found, which is a lack of a controller. His third arm isn’t just an idea, though. It’s a Yaskawa industrial robot that he was able to source for pretty cheap, but it was missing a few parts that he’s been slowly replacing.
The robot arm came without a controller or software, but also without any schematics of any kind, so the first step was reverse engineering the wiring diagram to get an idea of what was going on inside the arm. From there some drivers were built for the servos, but the key to all of it is the homemade controller. The inverse kinematics math was done in Python and runs on an industrial PC. Once it was finally all put together [caltadaniel] had a functioning robotic arm for any task he could think of.
Interestingly enough, while he shows the robot brushing his teeth for him, he also set it up to flip the switch of a useless machine that exists only to turn itself off. There’s something surreal about a massive industrial-sized robotic arm being used to turn on a $20 device which will switch itself back off instantly, but the absurdity is worth a watch.
Scope creep is a real pain in the real world, but for projects of passion it can have some interesting consequences. [rctestflight] was playing around with 3D printed rover gearboxes, which morphed into a 3D printed tank build.
[rctestflight]’s previous autonomous rover project had problems with the cheap geared motors, and he started experimenting with his own gearbox designs to use with lower RPM / Kv brushless drone motors. The tank came about because he wanted a simple vehicle to test his design. “Simple” went out the window pretty quickly and the final product was completely 3D printed except for the fasteners, axles, bearings, and electronics.
The tracks and gears are noisy, but it works quite well. On outdoor tests [rctestflight] did find that the tracks were prone to hooking on vines and branches, which in one case caused it to throw a track after the aluminium shaft bent. An Ardurover navigation system was added and with a 32 Ah battery was able to run autonomously for an entire day and there was surprisingly little wear on 3D printed gearbox and tracks afterward. All the STL files are up on Thingiverse, but [rctestflight] recommends waiting for an upcoming update because he discovered flaws in the design after filming the video after the break.
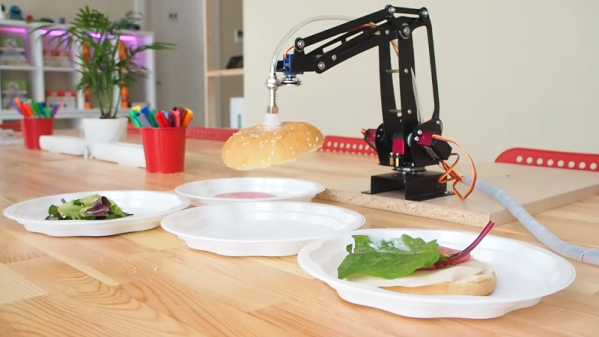
Most often, humans and robots do not have to work directly together, instead working on different parts in a production pipeline or with the robot performing tasks instead of a human. In such cases any human-robot interaction (HRI) will be superficial. Yet what if humans and robots have to work alongside each other? This is a question which a group of students at MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) have recently studied some answers to.
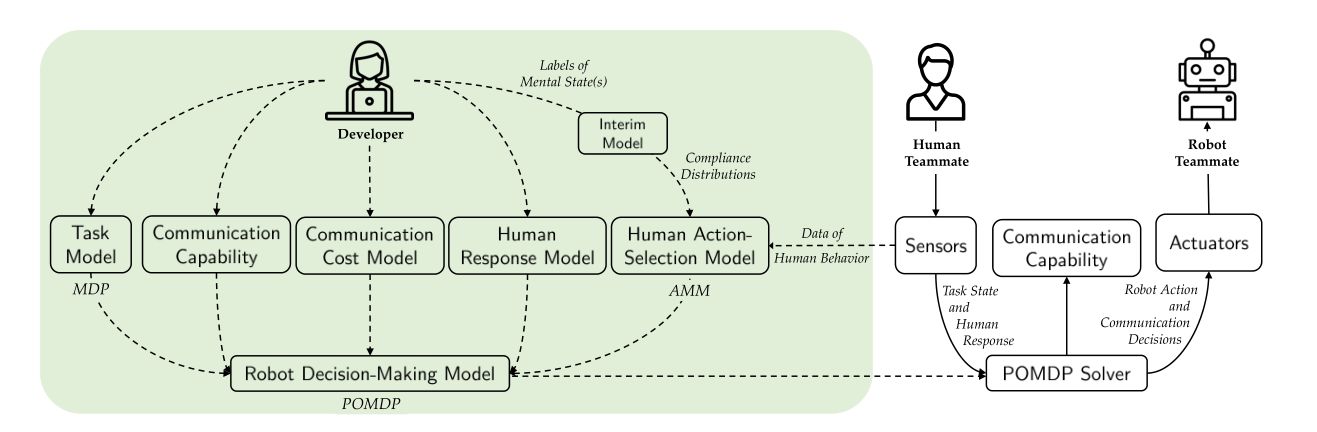
In their paper on human-robot collaborative tasks (PDF), they cover the three possible models one can use for this kind of interaction: there can be no communication (‘silent’), the communication can be pre-programmed (state machine), or in this case a Markov model-based system. This framework which they demonstrate is called CommPlan and it uses observation data from human subjects to construct a Markov model that can integrate sensor data in order to decide on its next action.
In the experiment they performed (the preparation of a meal; see the embedded video after the break), human subjects had to work alongside a robot. Between the three different approaches, the CommPlan one was the fastest, using voice interaction only when it deemed it to be necessary. The experiment’s subjects expressed hereby a preference for bidirectional communication, much as would occur between human workers.
Walking robots that move smoothly are tricky to build and usually involve some sort of compliant leg mechanism — a robot limb that can rebound like natural physiology for much better movement than what a stiff machine can accomplish. In his everlasting quest to build a real working robot dog, [James Bruton] is working on an affordable and accessible Mini Robot Dog, starting with the compliant leg mechanism.
The 3D printed leg mechanism has two joints (hip and knee), with an RC servo to drive each. To make the joints compliant, both are spring-loaded to absorb external forces, and the deflection is sensed by a hall effect sensor with moving magnets on each side. Using the inputs from the hall effect sensor, the servo can follow the deflection and return to its original position smoothly after the force dissipates. This is a simple technique but it shows a lot of promise. See the video after the break.
A project can sometimes develop a life of its own, or in the case of [James]’s OpenDog, spawn experimentally evolving offspring. This is number four, and it’s designed to be a platform for learning how to make a quadruped walk properly, and to be simple and cheap enough for others to build. We’re looking forward to seeing how it turns out.
If you missed it, also check out this robot’s weird sibling, self-balancing Sonic.
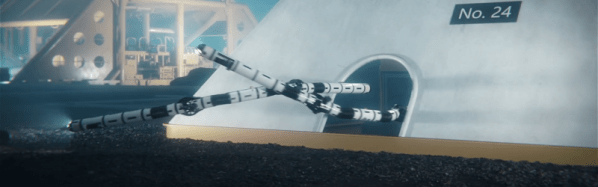
We can’t tell if the Eelume actually exists, or if it’s just a good CG and a design concept, but when we saw the video below, we wanted to start working on our version of it immediately. What’s an Eelume? A robotic eel that lives permanently under the ocean.
If you have to take care of something underwater — like a pipeline — this could be much more cost-effective than sending divers to the ocean floor. We liked the natural motion and we really liked the way the unit could switch batteries and tool heads.
We do have some questions, though. How do you get rid of one battery and pick up another? There would have to be some battery capacity that doesn’t exchange, but that’s not very efficient since the new battery would have to recharge the internal battery. Perhaps you can add batteries at either end. Some of the still pictures don’t clearly show how the batteries fit in, although they do show the flexible joints, sensors, cameras, and thrusters, which are all modular.
According to the web site, tools can go on either end and there’s a robot arm. The device can apparently shape itself like a U to bring both ends to bear on the same area. Generally, we like robots that mimic nature, but this is one of the best examples of that being practical we’ve seen.
There’s a video on the site of what appears to be real hardware tethered in a swimming pool, though we couldn’t tell how much of the device was subject to remote control and how much would be autonomous. Communicating underwater is finicky and usually requires either an antenna on the surface or a very low frequency (and, thus, not much bandwidth). While completely duplicating this would probably be a feat, it might inspire some hacker-friendly eels.







 The 3D printed leg mechanism has two joints (hip and knee), with an RC servo to drive each. To make the joints compliant, both are spring-loaded to absorb external forces, and the deflection is sensed by a hall effect sensor with moving magnets on each side. Using the inputs from the hall effect sensor, the servo can follow the deflection and return to its original position smoothly after the force dissipates. This is a simple technique but it shows a lot of promise. See the video after the break.
The 3D printed leg mechanism has two joints (hip and knee), with an RC servo to drive each. To make the joints compliant, both are spring-loaded to absorb external forces, and the deflection is sensed by a hall effect sensor with moving magnets on each side. Using the inputs from the hall effect sensor, the servo can follow the deflection and return to its original position smoothly after the force dissipates. This is a simple technique but it shows a lot of promise. See the video after the break.