Have you ever found yourself in a crowded restaurant on a Saturday night, holding onto one of those little gadgets that blinks and vibrates when it’s your turn to be seated? Next time, bust out the HackRF and follow along with [Tony Tiger] as he shows how it can be used to easily fire them off. Of course, there won’t actually be a table ready when you triumphantly show your blinking pager to the staff; but there’s only so much an SDR can do.
 Even if you aren’t looking to jump the line at your favorite dining establishment, the video that [Tony] has put together serves as an excellent practical example of using software defined radio (SDR) to examine and ultimately replicate a wireless communications protocol. The same techniques demonstrated here could be applied to any number of devices out in the wild with little to no modification. Granted these “restaurant pagers” aren’t exactly high security devices to begin with, but you’d be
Even if you aren’t looking to jump the line at your favorite dining establishment, the video that [Tony] has put together serves as an excellent practical example of using software defined radio (SDR) to examine and ultimately replicate a wireless communications protocol. The same techniques demonstrated here could be applied to any number of devices out in the wild with little to no modification. Granted these “restaurant pagers” aren’t exactly high security devices to begin with, but you’d be horrified surprised how many other devices out there take a similarly cavalier attitude towards security.
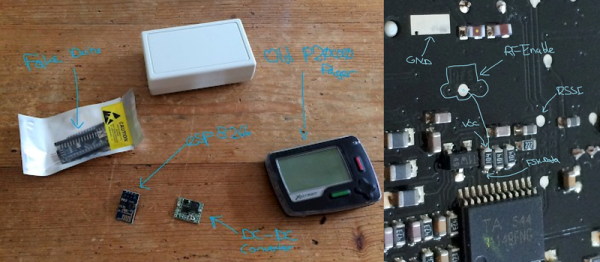
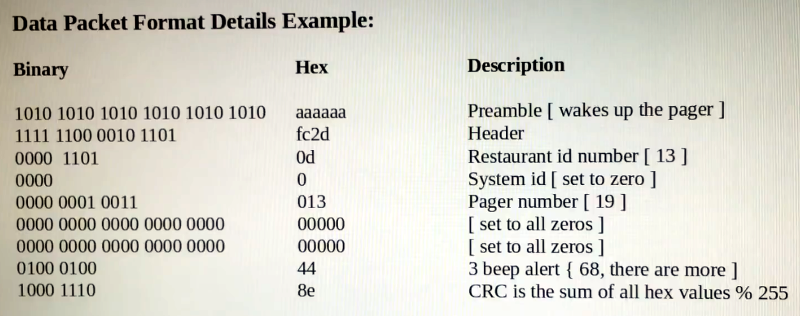
[Tony] starts by using inspectrum to examine the Frequency-shift keying (FSK) modulation used by the 467.750 Mhz devices, and from there, uses Universal Radio Hacker to capture the actual binary data being sent over the air. Between studying the transmissions and the information he found online, he was eventually able to piece together the packet structure used by the restaurant’s base station.
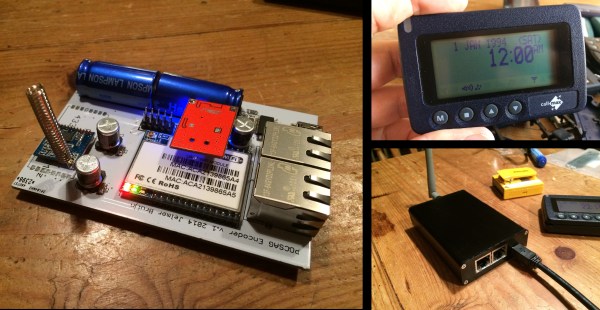
Finally, he wrote a Python script which generates packets based on which pager he wants to set off. If he’s feeling particularly mischievous, he can even set them all off at once. The script outputs a binary file which is then loaded into GNU Radio for transmission via the HackRF. [Tony] says he’s not quite ready to release his script yet, but he gives enough information in the video that the intrepid hacker could probably get their own version up and running by the time he gets it posted up to GitHub anyway.
We saw some very similar techniques demonstrated at the recent WOPR Summit security conference, so once you’re done hacking the local restaurants, you can take these same lessons and apply them to the rest of the Internet of Things. If you’re wondering, it’s even easier to eavesdrop on the non-restaurant pagers.