In the before-times, we could send text messages without looking at our phones. It was glorious, and something 90s Kids™ wish we could bring to our gigantic glowing rectangles stuck in our pocket. For his Hackaday Prize Entry, [Kyle] is bringing just a little bit of this sightless functionality back to the modern smartphone. He’s building a tactile remote control for smartphones. With this device, you can navigate through icons, push buttons, and even zoom in on maps with real, physical controls.
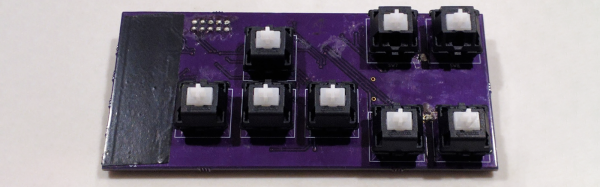
This keyboard is built around a handful of Cherry MX mechanical key switches for a great tactile feel, and a single capacitive touch strip for zooming in and out on the screen. This is pretty much exactly what you want for real, mechanical buttons for a smartphone — a satisfying click and a zoomy strip. The microcontroller used in this device is the BGM111 Bluetooth LE module from Silicon Labs. It’s an extremely low-power module that is able to read a cap touch strip and a few button inputs. Power is provided by a 2032 coin cell, giving the entire device a low profile form factor (except for the MX switches, but whatever), and more than enough run time.
It should be noted that [Kyle] is building this as a solution to distracted driving. True, looking down to send a quick text while driving is the cause of thousands of deaths. However, while typing out a quick note with a T9 keyboard on your Nokia seems like it’s less dangerous, it’s really not. Doing anything while driving is distracted driving, and there are volumes of studies to back this up. Outside the intended use case, this is a fantastic project that uses a neat little Bluetooth module we don’t see much of, and there are some pretty cool applications of a tiny wireless mechanical keyboard with cap touch we can think of.