Menopause, that fireworks finale of fertility, is like a second puberty that works in reverse. At least, that’s what we hear. Along with mood swings and acne, there are new joys like hot flashes that make you want to jump naked into the nearest snowdrift, or at least put your head in the freezer for a while. Sounds great; can’t wait.
The biggest problem with menopause is that it gives suffers pause when it comes to getting help. This is natural, they think. There’s nothing I can do but ride it out. Those who do seek relief are likely to find expensive products that only treat single symptoms. This dearth of solutions inspired [Moinak Ghosh] to create one system to rule them all, a wearable with a suite of sensors that’s designed to take the pause out of menopause.
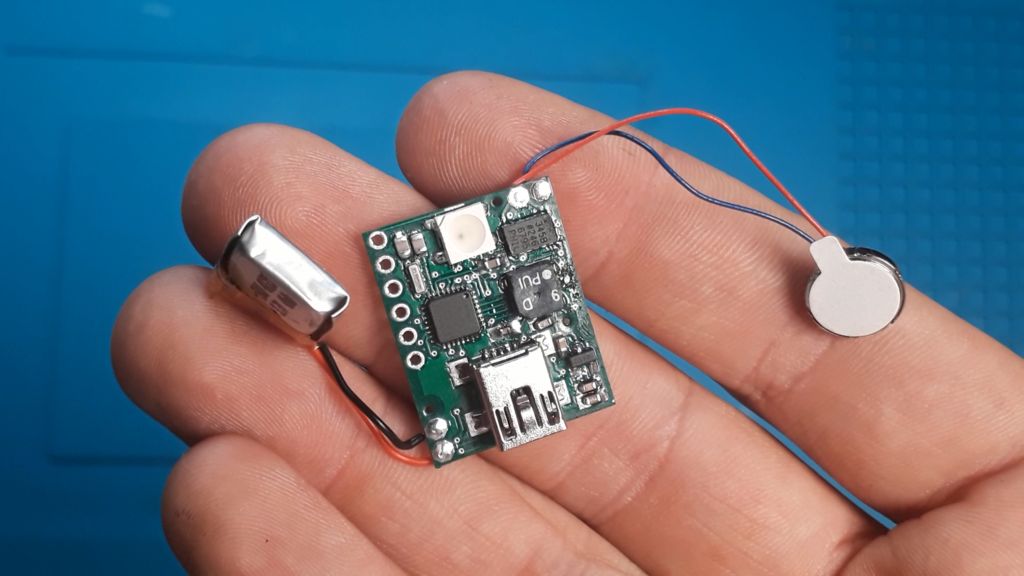
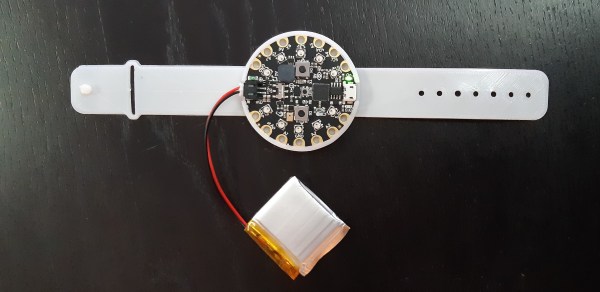
MenoPlay will take temperature readings at the neck and pelvis and switch on a Peltier module worn on the back of the neck when it senses a hot flash in progress. Exercise is a natural defense against hormonal imbalance, but step counters are too easy to cheat or ignore. The MenoPlay system will model the user’s movements using 9DoF accelerometers and suggest exercises that fill in the gaps.
We particularly like the automation aspect of this wearable. After decades of manually tracking menstrual cycles and everything that implies, the idea of so much useful biological data being collected automatically and fed over BLE to a NodeRed application sounds wonderful.
Hot flashes may not feel useful internally, but would do a fine job of powering the right kind of flashlight.