You know, it’s just not fair. It seems that even if we stay active, age will eventually get the better of our muscles, robbing them of strength and our bodies of mobility. Canes and walkers do not provide additional strength, just support and reassurance in a treacherous landscape. What people could really benefit from are wearable robots that are able to compensate for a lack of muscle strength.
 [Dr. Lee Jongwon] of the Korea Institute of Science and Technology has developed this very thing. MOONWALK-Omni is designed to “actively support leg strength in any direction”, and make one feel like they are walking on the moon. In order to test the wearable robot, [Dr. Jongwon] invited senior citizens to climb Korea’s Mount Yeongbong, which is some 604 meters (1980 feet) above sea level.
[Dr. Lee Jongwon] of the Korea Institute of Science and Technology has developed this very thing. MOONWALK-Omni is designed to “actively support leg strength in any direction”, and make one feel like they are walking on the moon. In order to test the wearable robot, [Dr. Jongwon] invited senior citizens to climb Korea’s Mount Yeongbong, which is some 604 meters (1980 feet) above sea level.
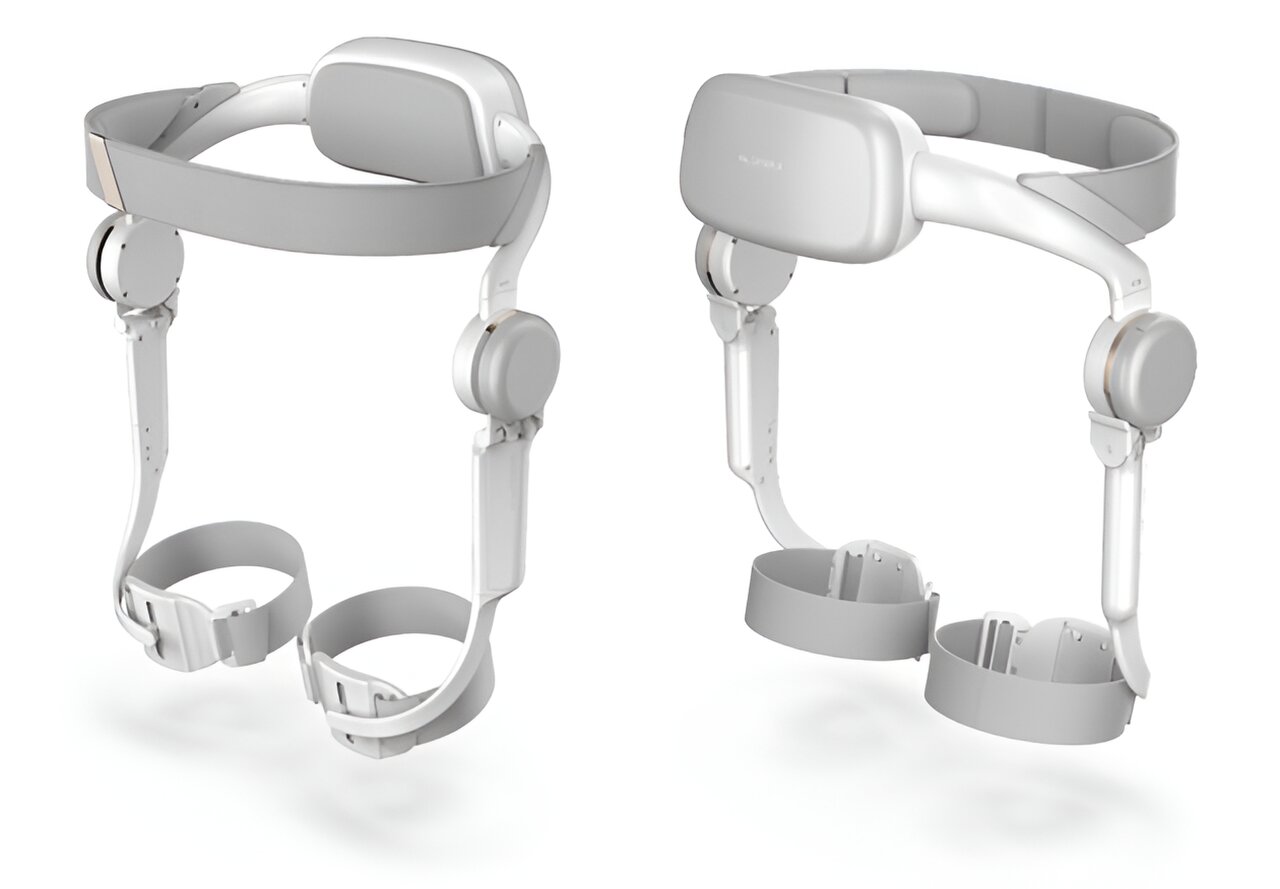
The robot weighs just 2 kg (about 4.5 lbs) and can be donned independently by the average adult in under ten seconds. There are four high-powered but ultra lightweight actuators on either side of the pelvis that aid balance and boost leg strength by up to 30%. This is all designed to increase propulsion.
An AI system works to analyze the wearer’s gait in real time in order to provide up-to-the-second effective muscle support in many different environments. One wearer, a formerly active mountain climber, reported feeling 10-20 years younger when reaching the top of Mount Yeongbong.
It’s quite interesting to see mobility robots outside of the simplicity of the rehabilitation setting. We have to wonder about the battery life. Will everyone over 65 be wearing these someday? We can only hope they become so affordable. In the meantime, here’s a wearable robot that travels all over your person for better telemetry.





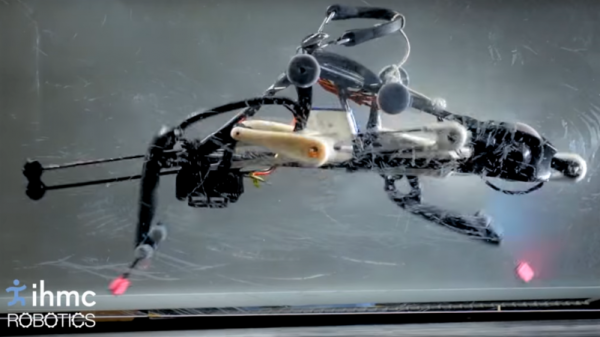
 A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.
A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.