Your garden variety car generally comes with four wheels, plus a spare in the boot. It’s a number landed upon after much consideration, with few vehicles deviating from the norm. That doesn’t mean there aren’t other possibilities however, and [RCLifeOn] decided to experiment in just such a manner.
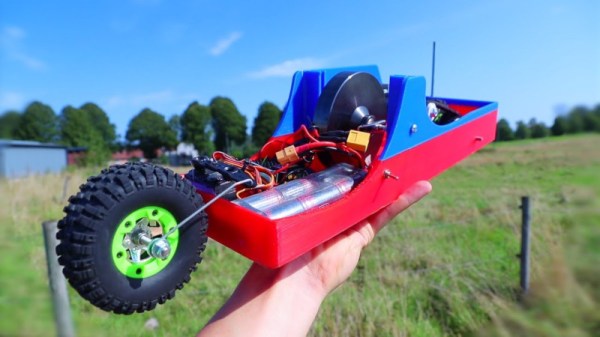
The result is a gyro-stabilized two-wheeled RC car, or as we might have put it, a motorcycle of sorts. A brushless motor drives the rear wheel, while steering up front is handled by a servo controlling the front wheel. A large spinning disc acts as a gyro in the center of the vehicle, and it’s all packaged in a simple 3D printed frame.
Results are impressive, with the gyro making a demonstrable difference to the vehicle’s performance. While it can be driven without the gyro enabled, it requires continual steering corrections to stay upright. With the gyro spun up, it rides much more like a bicycle, with few stability issues.
It’s a fun project, and a great way to learn about gyroscopic stability. Of course, there are great primers on the topic, too. Video after the break. Continue reading “Who Needs Four Wheels When You’ve Got A Gyro?”