Age, we’re told, is just a number, but that number seems to be the ever-increasing count of injuries of a ridiculous nature. Where once the younger version of us could jump from a moving car or fall out of a tree with just a few scrapes to show for the effort, add a few dozen trips around the sun and you find that just “sleeping funny” can put you out of service for a week.
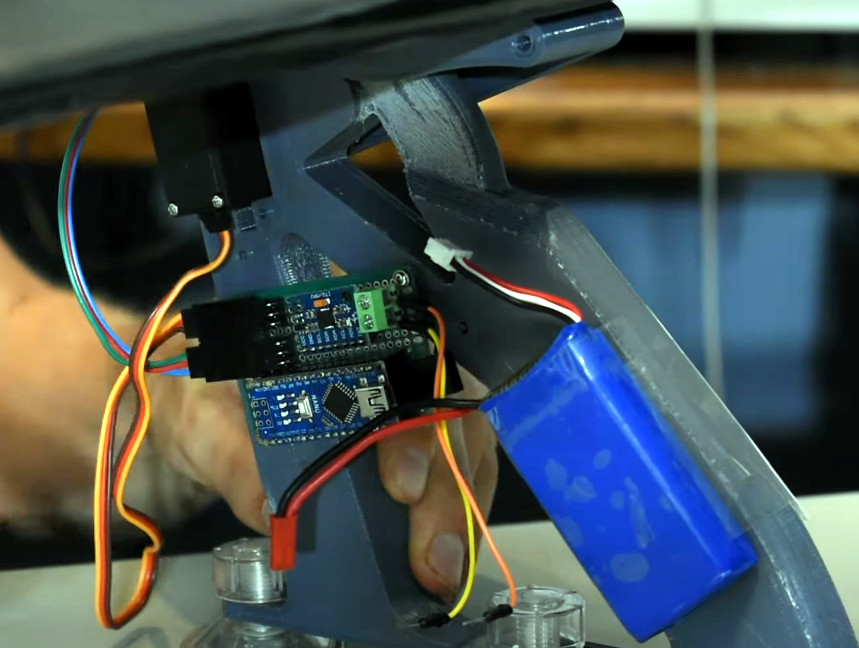
Keen to avoid such woes, [Elite Worm] came up with this sleep posture alarm to watch for nocturnal transgressions, having noticed that switching to a face-down sleeping position puts a kink in his neck. He first considered using simple mechanical tilt switches to detect unconscious excursions from supine to prone. But rather than be locked into a single posture, he decided to go with an accelerometer instead. The IMU and an ATtiny85 live on a custom PCB along with a small vibrating motor, which allows for more discrete alerts than a buzzer or beeper would.
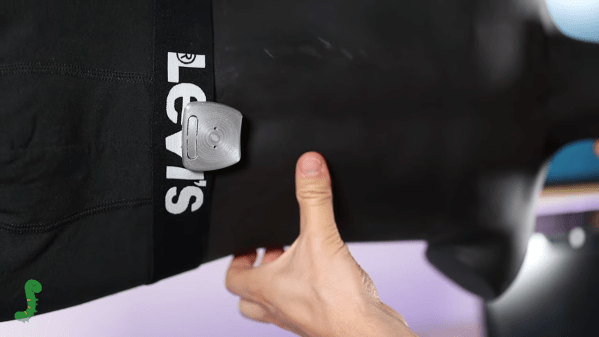
Placed in a 3D printed enclosure and clipped to his shorts, the wearable is ready to go. The microcontroller wakes up every eight seconds to check his position, sounding the alarm if he’s drifting into painful territory. [Elite] did some power analysis on the device, and while there’s room for improvement, the current estimated 18 days between charging isn’t too shabby. The video below has all the details; hopefully, design files and code will show up on his GitHub soon.
Considering that most of us spend a third of our life sleeping, it’s little wonder hackers have attacked sleep problems with gusto. From watching your brainwaves to AI-generated nonsense ASMR, there’s plenty of hacking fodder once your head hits the pillow.
Continue reading “Sleep Posture Monitor Warns You Away From Dangerous Positions”