South Korea’s Disease Control and Prevention Agency launched a pilot program yesterday to minimize vaccination waste using a nationwide smartphone app. People who are over 30 years of age can search for leftover doses on their smartphones. If any are available, they can book an appointment immediately within the app, and then get to the medical center within hours to receive the injection. One can tag up to five nearby inoculation centers to receive an instant message when a dose becomes available.
These leftover doses arise from people who have missed their appointment, but also just as you would expect when considering the short shelf life of the opened vaccine, the number of doses per vial, and modulo arithmetic. Within hours of the program rolling out, people began complaining about server problems and the lack of available doses. But this is a pilot program, after all, so some glitches are to be expected.
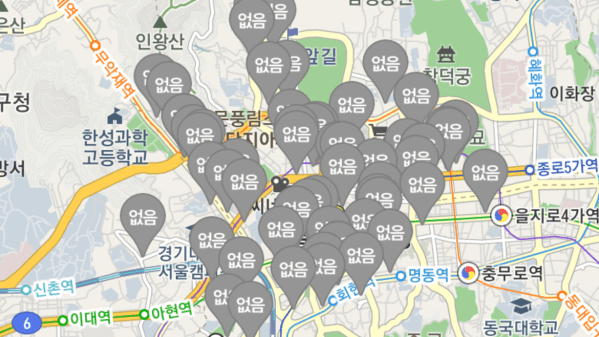
The full program is supposed to begin on June 9th, although it isn’t clear how it will be different from the pilot project, other than presumably having fewer bugs. The lead picture above shows the availability of leftover vaccines in central Seoul this morning — zero (the symbol 없음 means “none”). But the system does indeed work and people received vaccinations yesterday utilizing this program.
Technically speaking, this isn’t a new app, but rather, it is integrated into the two most popular South Korean portal sites. Anyone already using KakaoTalk or the Naver portal on their smartphone can use this leftover vaccination service with just the press of a few icons. Are the health authorities in your region utilizing smartphone apps or online reservations sites to distribute these leftover doses, doses that would otherwise be discarded? Let us know in the comments below.
Regardless of appearances, almost all scientific progress comes at a price. That which is hailed as a breakthrough technology that will save the planet or improve the lots of those living upon it almost always comes at a cost, which sometimes greatly outweighs the purported benefits of the advancement.
Luckily, though, solving these kinds of problems is what scientists and engineers live for, and in the case of the potentially breakthrough technology behind perovskite solar cells (PSCs), that diligence has resulted in a cleaner and safer way to manufacture them. We’ve covered the technology of perovskites in the past, but briefly, as related to photovoltaic cells, they’re synthetic crystals of organometallic cations bonded to a halide anion, so something like methylammonium lead tribromide. These materials have a large direct bandgap, which means a thin layer of the stuff can absorb as much solar energy as a much thicker layer of monocrystalline silicon — hence the intense interest in perovskites for cheap, easily manufactured solar cells.
The problem with scaling up PSC manufacturing has been the need for volatile and dangerous solvents to dissolve the perovskites. One such solvent, dimethylformamide (DMF), commonly used in pharmaceutical manufacturing and often a component of paint strippers, is easily absorbed through the skin and toxic to the liver in relatively low concentrations. Another common solvent, γ-butyrolactone (GBL), is a precursor to γ-hydroxybutyric acid (GHB), a common recreational club-drug known as “liquid ecstasy”.
In a recent paper, [Carys Wrosley] and colleagues at Swansea University showed that γ-valerolactone (GVL), a far less toxic and volatile solvent, could be effectively substituted for DMF and GBL in perovskite manufacturing processes. One of the most promising features of perovskites for solar cells is that the solution can be easily applied to transparent conductive substrates; the use of GVL as a solvent resulted in solar cells that were comparably efficient to cells made with the more dangerous solvents.
That collective “Phew!” you heard this week was probably everyone on the Mars Ingenuity helicopter team letting out a sigh of relief while watching telemetry from the sixth and somewhat shaky flight of the UAV above Jezero crater. With Ingenuity now in an “operations demonstration” phase, the sixth flight was to stretch the limits of what the craft can do and learn how it can be used to scout out potential sites to explore for its robot buddy on the surface, Perseverance.
While the aircraft was performing its 150 m move to the southwest, the stream from the downward-looking navigation camera dropped a single frame. By itself, that wouldn’t have been so bad, but the glitch caused subsequent frames to come in with the wrong timestamps. This apparently confused the hell out of the flight controller, which commanded some pretty dramatic moves in the roll and pitch axes — up to 20° off normal. Thankfully, the flight controller was designed to handle just such an anomaly, and the aircraft was able to land safely within five meters of its planned touchdown. As pilots say, any landing you can walk away from is a good landing, so we’ll chalk this one up as a win for the Ingenuity team, who we’re sure are busily writing code to prevent this from happening again.
If wobbling UAVs on another planet aren’t enough cringe for you, how about a blind mechanical demi-ostrich drunk-walking up and down a flight of stairs? The work comes from the Oregon State University and Agility Robotics, and the robot in question is called Cassie, an autonomous bipedal bot with a curious, bird-like gait. Without cameras or lidar for this test, the robot relied on proprioception, which detects the angle of joints and the feedback from motors when the robot touches a solid surface. And for ten tries up and down the stairs, Cassie did pretty well — she only failed twice, with only one counting as a face-plant, if indeed she had a face. We noticed that the robot often did that little move where you misjudge the step and land with the instep of your foot hanging over the tread; that one always has us grabbing for the handrail, but Cassie was able to power through it every time. The paper describing how Cassie was trained is pretty interesting — too bad ED-209’s designers couldn’t have read it.
So this is what it has come to: NVIDIA is now purposely crippling its flagship GPU cards to make them less attractive to cryptocurrency miners. The LHR, or “Lite Hash Rate” cards include new-manufactured GeForce RTX 3080, 3070, and 3060 Ti cards, which will now have reduced Ethereum hash rates baked into the chip from the factory. When we first heard about this a few months ago, we puzzled a bit — why would a GPU card manufacturer care how its cards are used, especially if they’re selling a ton of them. But it makes sense that NVIDIA would like to protect their brand with their core demographic — gamers — and having miners snarf up all the cards and leaving none for gamers is probably a bad practice. So while it makes sense, we’ll have to wait and see how the semi-lobotomized cards are received by the market, and how the changes impact other non-standard uses for them, like weather modeling and genetic analysis.
Speaking of crypto, we found it interesting that police in the UK accidentally found a Bitcoin mine this week while searching for an illegal cannabis growing operation. It turns out that something that uses a lot of electricity, gives off a lot of heat, and has people going in and out of a small storage unit at all hours of the day and night usually is a cannabis farm, but in this case it turned out to be about 100 Antminer S9s set up on janky looking shelves. The whole rig was confiscated and hauled away; while Bitcoin mining is not illegal in the UK, stealing the electricity to run the mine is, which the miners allegedly did.
And finally, we have no idea what useful purpose this information serves, but we do know that it’s vitally important to relate to our dear readers that yellow LEDs change color when immersed in liquid nitrogen. There’s obviously some deep principle of quantum mechanics at play here, and we’re sure someone will adequately explain it in the comments. But for now, it’s just a super interesting phenomenon that has us keen to buy some liquid nitrogen to try out. Or maybe dry ice — that’s a lot easier to source.
It’s a well-established fact that a guitarist’s acumen can be accurately gauged by the size of their pedal board- the more stompboxes, the better the player. Why have one box that can do everything when you can have many that do just a few things?
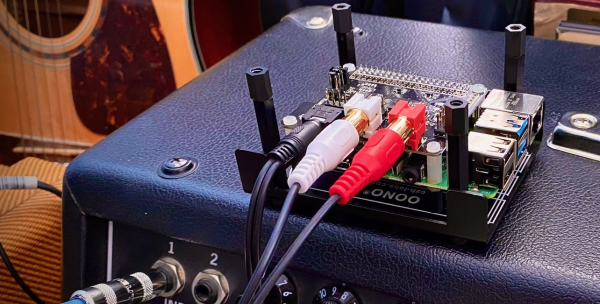
Jokes aside, the idea of replacing an entire pedal collection with a single box is nothing new. Your standard, old-school stompbox is an analog affair, using a combination of filters and amplifiers to achieve a certain sound. Some modern multi-effects processors use software models of older pedals to replicate their sound. These digital pedals have been around since the 90s, but none have been quite like the NeuralPi project. Just released by [GuitarML], the NeuralPi takes about $120 of hardware (including — you guessed it — a Raspberry Pi) and transforms it into the perfect pedal.
The key here, of course, is neural networks. The LSTM at the core of NeuralPi can be trained on any pedal you’ve got laying around to accurately reproduce its sound, and it can even do so with incredibly low latency thanks to Elk Audio OS (which even powers Matt Bellamy’s synth guitar, as used in Muse‘s Simulation Theory World Tour). The result of a trained model is a VST3 plugin, a popular format for describing audio effects.
This isn’t the first time we’ve seen some seriously cool stuff from [GuitarML], and it also hearkens back a bit to some sweet pedal simulation in LTSpice we saw last year. We can’t wait to see this project continue to develop — over time, it would be awesome to see a slick UI, or maybe somebody will design a cool enclosure with some knobs and an honest-to-god pedal for user input!
Kinetic energy recovery systems have often been proposed as a useful way to improve the efficiency of on-road vehicles, and even used to great effect in motorsports for added performance. [Tom Stanton] decided to build one of his own, outfitting a simple bicycle with a flywheel system for harvesting energy. (Video, embedded below.)
The system consists of a 300 mm steel flywheel mounted in the center of the bike’s frame. It’s connected to the rear wheel via a chain and a clutch which [Tom] assembled himself using bicycle disc brake components. The clutch is controlled by a handlebar lever, allowing the rider to slow the bike by charging the flywheel, or to charge the flywheel to maximum speed by pedalling hard with the clutch engaged.
The actual utility of the flywheel is minimal; [Tom] notes that even at its peak speed of 2200 RPM, the flywheel stores a small fraction of the energy content of a AA battery. Practical demonstration shows the flywheel is only able to deliver a small push to [Tom] when riding the bike, too.
Despite the lack of performance, it’s nonetheless an interesting project and one that demonstrates the basic principles of flywheel energy storage. The underwhelming results perhaps serve as a solid indication of why it’s not something we use particularly often, on bicycles at least. We’ve seen [Tom]’s bike experiments before, too. Video after the break.
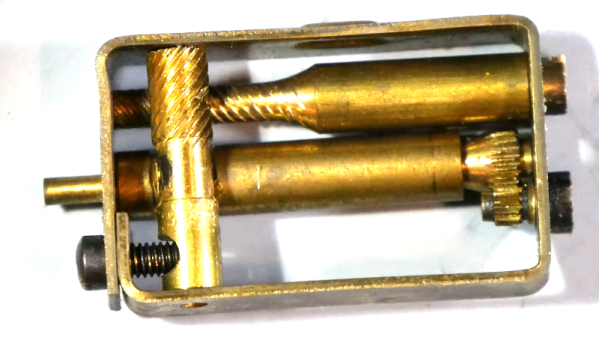
We didn’t know what a C-2400 LP was before we saw [David’s] video below, but it turned out to be pretty interesting. The device is an aircraft compass and after replacing it, he decided to take it apart for us. Turns out, that like a nautical compass, these devices need adjustment for all the metal around them. But while a ship’s compass has huge steel balls for that purpose, the tiny and lightweight aviation compass has to be a bit more parsimonious.
The little device that stands in for a binnacle’s compensators — often called Kelvin’s balls — is almost like a mechanical watch. Tiny gears and ratchets, all in brass. Apparently, the device is pretty reliable since the date on this one is 1966.
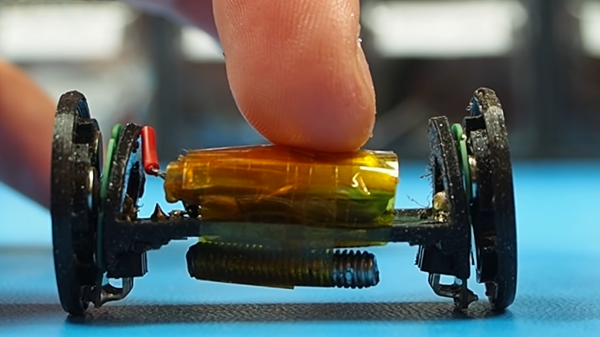
[Carl Bugeja] has been working on his PCB motors for more than three years now, and it doesn’t seem like he is close to running out of ideas for the project. His latest creation is a tiny Bluetooth-controlled robot built around two of these motors.
One of the main challenges of these axial flux PCB motors is their low torque output, so [Carl] had to make the robot as light as possible. The main board contains a microcontroller module with integrated Bluetooth, an IMU, regulator, and two motor drivers. The motor stator boards are soldered to the main board using 90° header pins. The frame for the body and the rotors for the motors are 3D printed. A set of four neodymium magnets and a bearing is press-fit into each rotor. The motor shafts are off-the-shelf PCB pins with one end soldered to the stator board. Power comes from a small single-cell lipo battery attached to the main board.
The robot moves, but with a jerking motion, and keeps making unintended turns. The primary cause of this seems to be the wobbly rotors, which mean that the output torque fluctuates throughout the rotation of the motor. Since there are only two points of contact to the ground, only the weight of the board and battery is preventing the central part from rotating with the motors. This doesn’t look like it’s quite enough, so [Carl] wants to experiment with using the IMU to smooth out the motion. For the next version, he’s also working on a new shaft mount, a metal rotor, and a more efficient motor design.
We look forward to seeing this in action, and also what other application [Carl] can come up with. He has already experimented with turning it into a stepper motor, a linear motor, and a tiny jigsaw motor.