Does paying more for air quality monitors (AQMs) make sense? This was the question which [Achim Haug] at the Air Gradient project sought to answer, with the answer being a rather revealing ‘not at all’. Using data from the independent South Coast Air Quality Management District agency (South Coast AQMD), a plot was created of a range of commercially available AQMs for PM2.5 pollutants and their performance against a reference monitor. Here a value of 1.00 would mean performance equal to the (expensive, calibrated) reference.
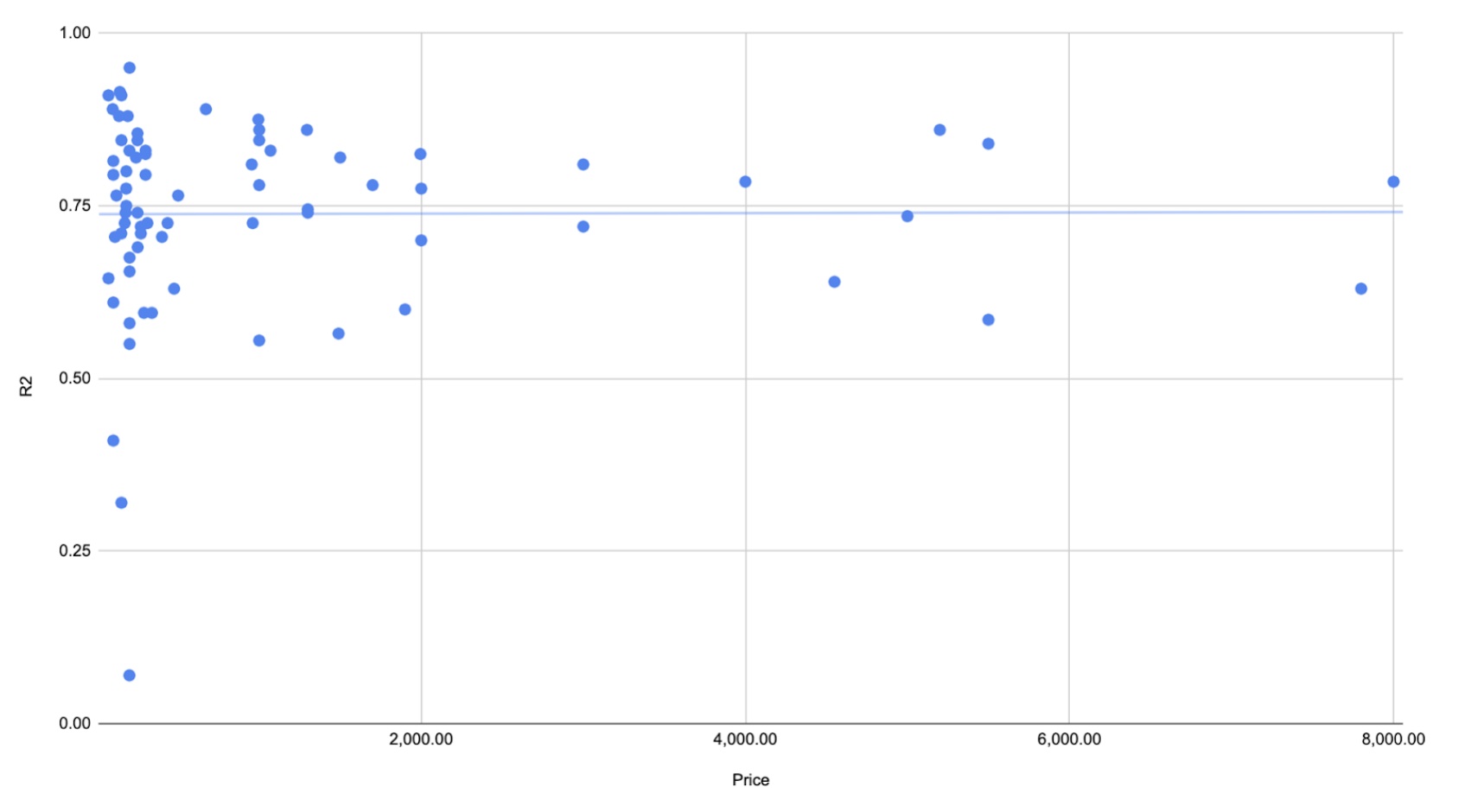
This plot shows clearly that paying more for an AQM does not get you better performance, with the reason for this explored in a follow-up article by [Achim], where a range of AQMs are checked for which PM2.5 sensors they actually use. Perhaps unsurprisingly, most AQMs use the same PM2.5 sensors, with the sensor module not really affecting the cost of the AQM as they all cost about $10-20 in bulk.
Rather it seems that the other sensors (for CO2, NO2 and other measurements) along with features such as WiFi, LoRa determine much of the price tag. For getting good measurements, properties such as airflow over the sensors, the implemented compensation algorithms are probably the main things you want to look at when purchasing (or building) an AQM.
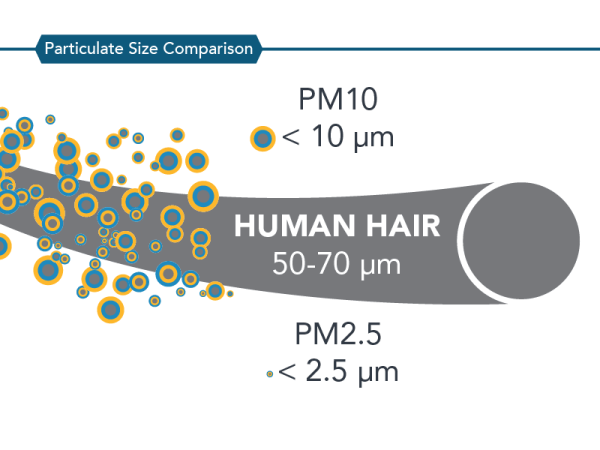
(Heading image: particulate matter sizes, relative to a human hair. Credit: California ARB)