The 2022 Hackaday Prize continues to hurtle along, with two of the five Challenges already in the rear-view mirror. While we’re naturally excited about every phase of this year’s contest, we’ve got particularly high hopes for what the community can do with this third Challenge: Hack it Back.
It’s a simple formula: find some outdated and disused piece of gear, spruce it up, and keep it out of the landfill. But extending the lifetime of consumer hardware is only one side of the coin, by upgrading and modifying something instead of buying an off-the-shelf replacement, you also turn the mundane into something unique and personal. But of course, we hardly have to explain the benefits to you fine folk — this is the sort of bespoke engineering we see on a nearly daily basis here at Hackaday. The difference now is that there’s cash prizes on the line.
What’s that you say? You aren’t the type to be seduced by shiny new features? Happy to keep things local while others ship it all off to the cloud? You’ll get no complaints from us, and that’s why the Hack it Back Challenge also recognizes repairs that simply put a piece of gear back into service. But don’t be fooled, as fixing something can often be harder than rebuilding it from scratch.
Ready to put your hardware-reviving skills on display? Just head over to Hackaday.io, make a new project page, and get hacking. But don’t wait too long, you’ve only got until July 24th to enter the Hack it Back Challenge and stake your claim on one of the ten $500 awards up for grabs.
When we think of robotics, the first thing that usually comes to mind for many of us is some sort of industrial arm that’s bolted to the floor, or perhaps a semi-autonomous rover trudging its way across the dusty Martian landscape. While these two environments are about as different as can be, the basic “rules” are pretty much the same. Being on firm ground ground gives the robot a clear understanding of its position and orientation, which greatly simplifies tasks such as avoiding collisions or interacting with nearby objects.
But what happens when that reference point goes away? How does a robot navigate when it’s flying through open space or hovering in mid-air? That’s just one of the problems that fascinates Nick Rehm, who stopped by to host this week’s Aerial Robotics Hack Chat to talk about his passion for flying robots. He’s currently an aerospace engineer at Johns Hopkins Applied Physics Laboratory, where he works on the unique challenges faced by autonomous flying vehicles such as the detection and avoidance of mid-air collisions, as well as the development of vertical take-off and landing (VTOL) systems. But before he had his Master’s in Aerospace Engineering and Rotorcraft, he got started the same way many of us did, by playing around with DIY projects.
In fact, regular Hackaday readers will likely recall seeing some of his impressive builds. His autonomous ekranoplan designed to follow a target using computer vision graced the front page in April. Back in 2020, we took a look at his recreation of SpaceX’s Starship prototype, which used a realistic arrangement of control surfaces and vectored thrust to perform the spacecraft’s signature “Belly Flop” maneuver — albeit with RC motors and propellers instead of rocket engines. But even before that, Nick recalls asking his mother for permission to pull apart a Wii controller so he could use its inertial measurement unit (IMU) in a wooden-framed tricopter he was working on.
Discussing some of these hobby builds leads the Chat towards Nick’s dRehmFlight project, a GPLv3 licensed flight control package that can run on relatively low-cost hardware, namely a Teensy 4.0 microcontroller paired with the GY-521 MPU6050 IMU. The project is designed to let hobbyists easily experiment with VTOL craft, specifically those that transition between vertical and horizontal flight profiles, and has powered the bulk of Nick’s own flying craft.
Moving onto more technical questions, Nick says one of the most difficult aspects when designing an autonomous flying vehicle is getting your constraints nailed down. What he means by that is having a clear goal of what the craft needs to do, and critically, how long it needs to do it. How far does the craft need to be able to fly? How fast? Does it need to loiter at the target location, and if so, for how long? The answers to these questions will largely dictate the form of the final vehicle, and are key to determining if it’s worth implementing the complexity of transitioning from VTOL to fixed-wing horizontal flight.
But according to Nick, the biggest challenge in aerial robotics is onboard state estimation. That is, the ability for the craft to know its position and orientation relative to the ground. While high-performance computers have gotten lighter and sensors have improved, he says there’s still no substitute for having a ground-based tracking system. He mentions that those fancy demonstrations you’ve seen with drones flying in formation and working collaboratively towards a task will almost certainly have an array of motion capture cameras tucked off to the side. This makes for an impressive show, but greatly limits the practical application of these drone swarms.
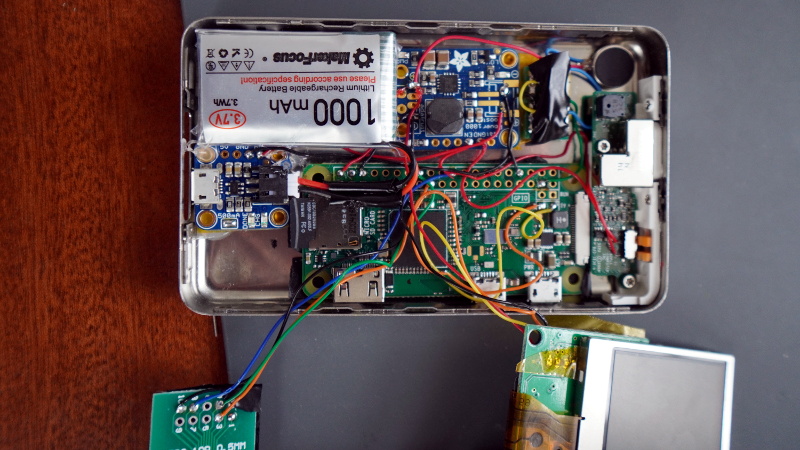
Nick’s custom Raspberry Pi 4-powered quadcopter lets him test autonomous flight techniques.
So what does the future of aerial robotics look like? Nick says open source projects like ArduPilot and PX4 are still great choices for hobbyists, but sees promise in newer platforms which pair the traditional autopilot with more onboard computing power, such as Auterion’s Skynode. More powerful flight controllers can enable techniques such as simultaneous localization and mapping (SLAM), which uses 3D scans of the environment to help the robot orient itself. He’s also very interested in technologies that enable autonomous flight in GPS-denied environments, which is critical for robotic craft that need to operate indoors or in situations where satellite navigation is unavailable or unreliable. In light of the incredible success of NASA’s Ingenuity helicopter, we imagine these techniques will also play an invaluable role in the future airborne exploration of Mars.
We want to thank Nick for hosting this week’s Aerial Robotics Hack Chat, which turned out to be one of the fastest hours in recent memory. His experience as both an avid hobbyist and a professional in the field provided exactly the sort of insight the Hackaday community looks for, and his gracious offer to keep in touch with several of those who attended the Chat to further discuss their projects speaks to how passionate he is about this topic. We expect to see great things from Nick going forward, and would love to have him join us again in the future to see what he’s been up to.
The Hack Chat is a weekly online chat session hosted by leading experts from all corners of the hardware hacking universe. It’s a great way for hackers connect in a fun and informal way, but if you can’t make it live, these overview posts as well as the transcripts posted to Hackaday.io make sure you don’t miss out.
Buying broken gear for cheap is time honored hacker tradition, and while we might not always be successful in reviving it, rarely do we come away empty handed. There’s always parts to salvage, and you can’t put a price on the knowledge to be gained when poking around inside an interesting piece of hardware. So we’re not surprised at all to hear that [Tomas Pavlovic] jumped at the chance to grab this faulty HP-48S calculator for a couple bucks.
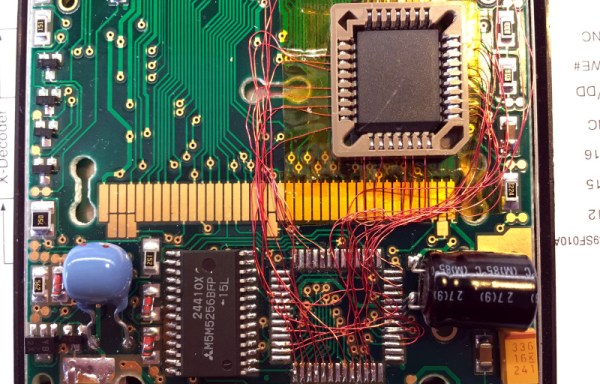
Luckily for us, the story doesn’t end at the bottom of his parts bin. When he got the HP-48S back home, he immediately set out to see if it could be repaired. After changing out a few choice components and not seeing any result in the device’s behavior, he became suspicious that the problem may be with the firmware; specifically, the soldered-on chip that holds it.
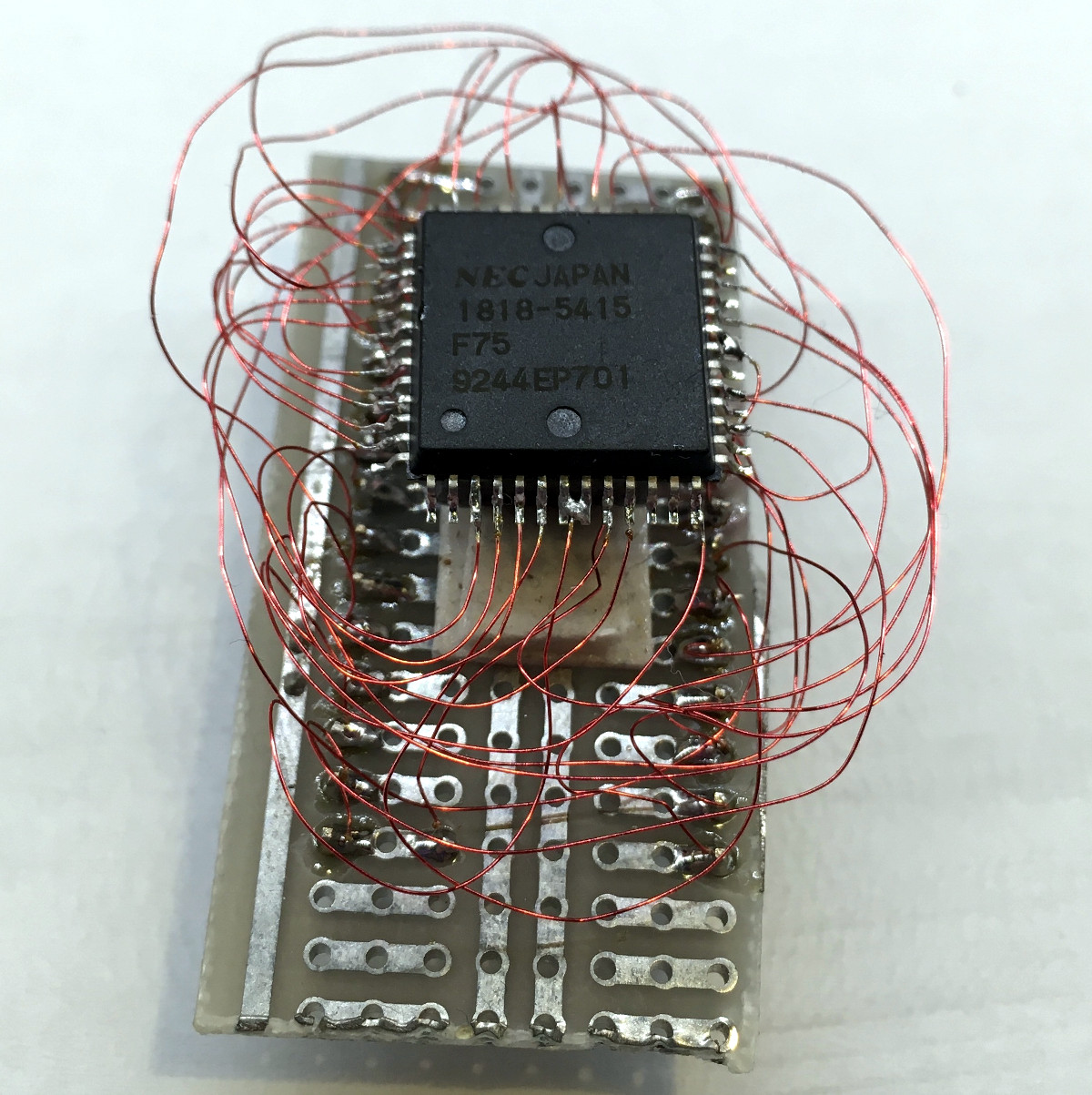
Dumping the original ROM.
After carefully lifting the NEC uPD23C2000GC from its resting place for the last 30 years or so, he wired up an adapter that let him connect the chip to his programmer so its contents could be dumped. Rather than trying to find another ROM chip, he decided to wire in a socket and found a re-writable SST39SF040 that could stand in as a replacement. Flashing a fresh copy of the firmware to the new socketed chip got the calculator up and running again, with the added bonus of allowing [Tomas] to pull the chip and flash a different firmware version should he care to experiment a bit.
Now, we know what you’re thinking. Where was the fix? What exactly brought this piece of 1990s gear back to life? That part, unfortunately, isn’t very clear. You’d think if the original ROM chip was somehow faulty, [Tomas] wouldn’t have been able to so easily pull a valid firmware image from it. That leaves us with some pretty mundane possibilities, such as a bad solder joint on the chip’s pins. If that was indeed the case, this fix could have been as simple as running a hot iron over the pins…but of course, where’s the fun in that?
Update: We heard back from [Tomas], and it turns out that when compared to a known good copy, the dumped firmware did have a few swapped bits. His theory is that the NEC chip is in some weird failure mode where the calculator wouldn’t run, but it was still functional enough to get most of the content off of it. What do you think? Let us know in the comments.
It wasn’t long after early humans started banging rocks together that somebody in the tribe thought they could improve on things a bit by doing it with a little rhythm. As such the first musician was born, and since it would be a couple million years before humanity figured out how to record sound, musical performances had to be experienced live throughout most of history. On the cosmic scale of things, Spotify only shows up about a zeptosecond before the big bash at midnight.
So its only fitting that [Linus Åkesson] has perfected the musical floppy drive to the point that it can now be played live. We understand the irony of this being demonstrated via the video below the break, but we think it still gets the point across — rather than having to get a whole array of carefully-scripted drives going to perform something that even comes close to a musical number, he’s able to produce tones by manipulating a single drive in real-time.
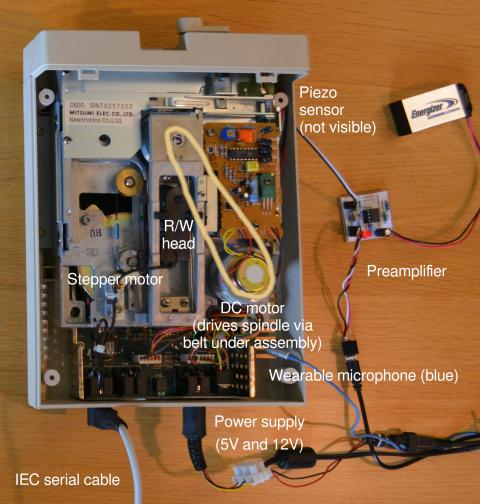
In his write-up, [Linus] not only goes over the general nuts and bolts of making music with floppy drives, but specifically explains how this Commodore 1541-II drive has been modified for its new life as a digital virtuoso. From his experiments to determine which drive moves corresponded to the most pleasing sounds, to the addition of a small microphone and a piezo sensor paired with an LMC662-based amplifier to provide a high-fidelity capture of the drive’s sounds and vibrations, there’s a lot of valuable info here for anyone else looking to make some sweet tunes with their old gear.
We’re suckers for a nice seven-segment LED display around these parts, and judging by how often they seem to pop up in the projects that come our way, it seems the community is rather fond of them as well. But though they’re cheap, easy to work with, and give off that all important retro vibe, they certainly aren’t perfect. For one thing, their visibility can be pretty poor in some lighting conditions, especially if you’re trying to photograph them for documentation purposes.
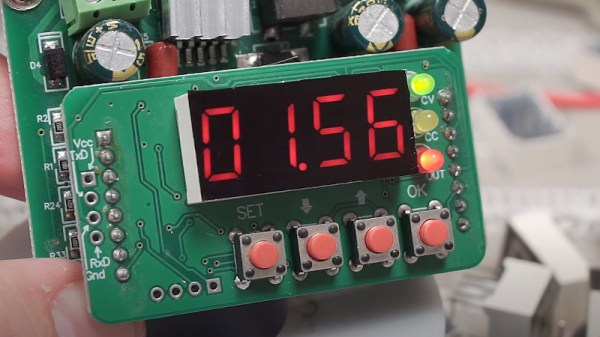
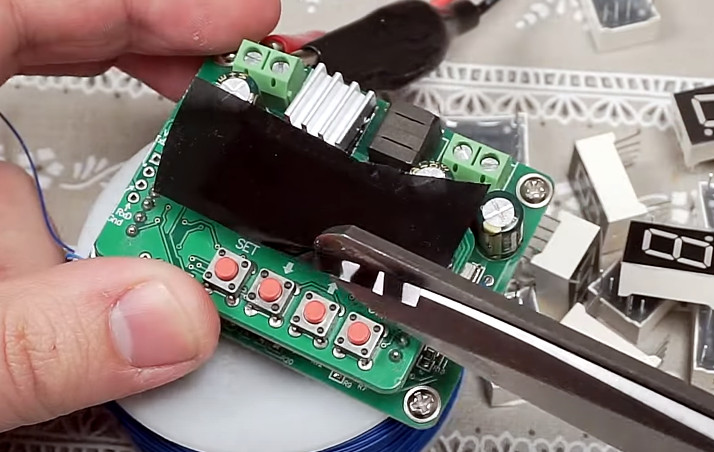
The tint film can be cut to size once applied.
If this is a problem you’ve run into recently, [Hugatry] has a simple tip that might save you some aggravation. With a scrap piece of automotive window tint material, it’s easy to cut a custom filter that you can apply directly to the face of the display. As seen in the video, the improvement is quite dramatic. The digits were barely visible before, but with the added contrast provided by the tint, they stand bright and beautiful against the newly darkened background.
[Hugatry] used 5% tint film for this demonstration since it was what he already had on hand, but you might want to experiment with different values depending on the ambient light levels where you’re most likely to be reading the display. The stuff is certainly cheap enough to play around with — a quick check seems to show that for $10 USD you can get enough film to cover a few hundred displays. Which, depending on the project, isn’t nearly as overkill as you might think.
When NASA astronauts aboard the International Space Station have to clamber around on the outside of the orbiting facility for maintenance or repairs, they don a spacesuit known as the Extravehicular Mobility Unit (EMU). Essentially a small self-contained spacecraft in its own right, the bulky garment was introduced in 1981 to allow Space Shuttle crews to exit the Orbiter and work in the craft’s cavernous cargo bay. While the suits did get a minor upgrade in the late 90s, they remain largely the product of 1970s technology.
Not only are the existing EMUs outdated, but they were only designed to be use in space — not on the surface. With NASA’s eyes on the Moon, and eventually Mars, it was no secret that the agency would need to outfit their astronauts with upgraded and modernized suits before moving beyond the ISS. As such, development of what would eventually be the Exploration Extravehicular Mobility Unit (xEMU) dates back to at least 2005 when it was part of the ultimately canceled Constellation program.
NASA’s own xEMU suit won’t be ready by 2025.
Unfortunately, after more than a decade of development and reportedly $420 million in development costs, the xEMU still isn’t ready. With a crewed landing on the Moon still tentatively scheduled for 2025, NASA has decided to let their commercial partners take a swing at the problem, and has recently awarded contracts to two companies for a spacesuit that can both work on the Moon and replace the aging EMU for orbital use on the ISS.
As part of the Exploration Extravehicular Activity Services (xEVAS) contract, both companies will be given the data collected during the development of the xEMU, though they are expected to create new designs rather than a copy of what NASA’s already been working on. Inspired by the success of the Commercial Crew program that gave birth to SpaceX’s Crew Dragon, the contract also stipulates that the companies will retain complete ownership and control over the spacesuits developed during the program. In fact, NASA is even encouraging the companies to seek out additional commercial customers for the finished suits in hopes a competitive market will help drive down costs.
There’s no denying that NASA’s partnerships with commercial providers has paid off for cargo and crew, so it stands to reason that they’d go back to the well for their next-generation spacesuit needs. There’s also plenty of incentive for the companies to deliver a viable product, as the contact has a potential maximum value of $3.5 billion. But with 2025 quickly approaching, and the contact requiring a orbital shakedown test before the suits are sent to the Moon, the big question is whether or not there’s still enough time for either company to make it across the finish line.
The MMORPG RuneScape holds a special place in the hearts of those who played it in the early 2000s. Sure it might seem exceptionally quaint by modern standards, but at the time it was groundbreaking stuff. Plus you could play it for free, which certainly helped get people onboard. While there’s a more modern build available, many who played the game from the early days prefer to stick with what they know, and continue to run a version of the game that has now become known as Old School RuneScape.
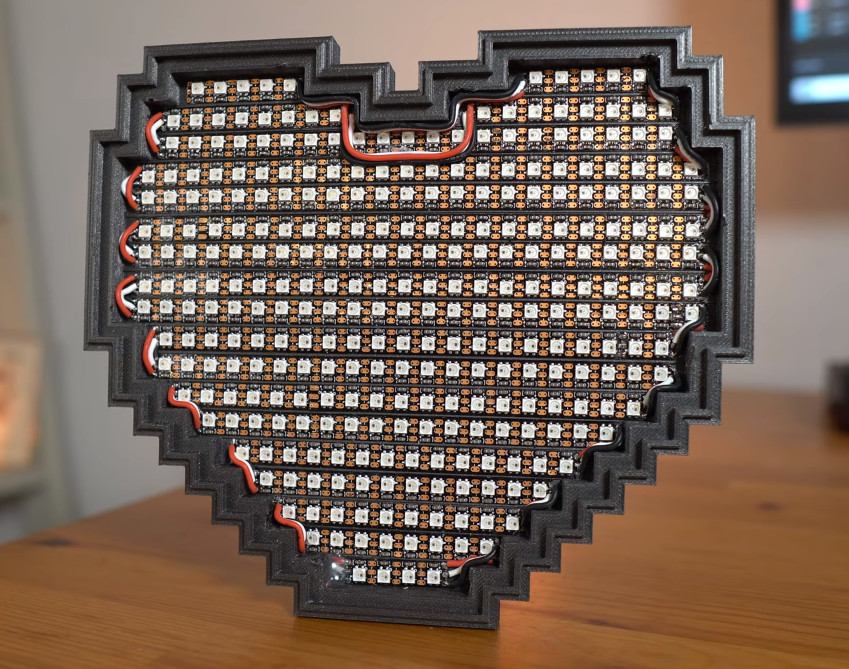
[Austin Blake] is one of those early adopters, and the work he put into this LED health indicator should tell you all you need to know about how dedicated he is to the classic game. The 3D printed heart holds an incredible 312 NeoPixel LEDs, which are controlled by a 5 volt compatible Arduino Nano Every located on the back side. Both the color and “fill level” of the heart will change in real-time to correspond to the health of the player character.
Building the light itself was pretty straightforward, but getting the health value from the game was another story. As [Austin] explains in the video, his first attempt involved using Python and some image recognition routines to literally read the indicator off of the screen. The idea worked, and is frankly a fascinating hack worth keeping in mind on its own, but unfortunately it was too slow to provide the real-time feedback he was looking for.
Eventually he turned his attention to RuneLite, which is an open source client for Old School RuneScape. Thanks to its open source nature he could have hacked a routine to read the current health value and send it off to the Arduino, but thanks to a mature plug-in system, he didn’t have to.

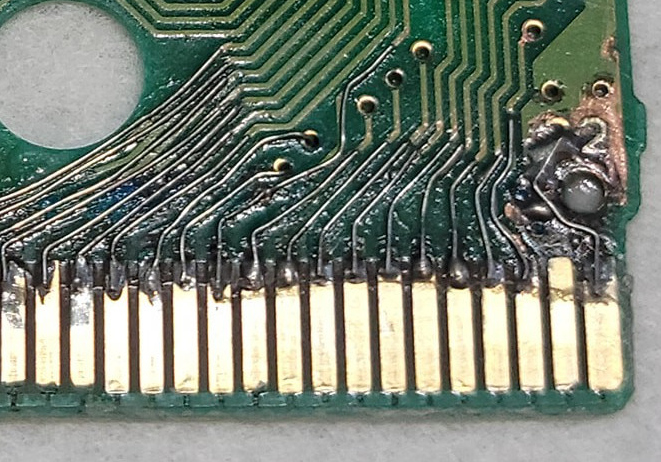 When you’ve got to crack out the x-ray machine to find all the damaged traces on a decades-old PCB, only to then tediously replace them all with microscopic bits of wire, you may find yourself wondering what you’ve done to anger the Keeper of the Magic Smoke. On the other hand, plenty a gadget has been disabled due to nothing more exotic than a single bad solder joint. In either event, there’s a certain sense of satisfaction when you can return a literal piece of history to working condition.
When you’ve got to crack out the x-ray machine to find all the damaged traces on a decades-old PCB, only to then tediously replace them all with microscopic bits of wire, you may find yourself wondering what you’ve done to anger the Keeper of the Magic Smoke. On the other hand, plenty a gadget has been disabled due to nothing more exotic than a single bad solder joint. In either event, there’s a certain sense of satisfaction when you can return a literal piece of history to working condition.