Do you ever wish that you could log in to your clock from your phone and turn off your TV? We assume that [Ioszelos] did. The clock can also play MP3s and stream radio stations. It can record the indoor temperature, humidity, and barometric pressure. Did we mention it’s an FM radio too? We’re not sure, but we wouldn’t be surprised if there was a faucet hiding somewhere on the contraption.
A team effort shared between an ESP32 and Mega 2560 run the Rube Goldberg-like show. Custom boards were spun up to provide the control and voltages needed for the nixie tubes. The clock is constructed from machined plates and 3D printed files.
It all comes together in a steampunk reminiscent assembly. The glow from the RGB leds and nixie tubes combine to make an interesting visual effect. We’ve certainly never seen a clock quite like it before.
If you connect to remote computers over the Internet, it is a pretty good chance you use some form of SSH or secure shell. On Linux or Unix you’ll use the ssh command. Same goes for Linux-like environments on Windows like Cygwin or WSL. For native Windows, you might be using Putty. In its simplest form, ssh is just a terminal program that talks to a server using an encrypted connection. We think it is very hard to eavesdrop on anyone communicating with a remote computer via ssh.
There are several tricks for using ssh — some are pretty straightforward and some are things you might not think of as being in the domain of a terminal program. You probably know that ssh can copy files securely, and there are easy and hard ways to set up logging in with no password.
However, you can also mount a remote filesystem via ssh (actually, there are several ways to do that). You can use ssh to securely browse the web in your favorite browser, or even use it to tunnel specific traffic by port or even use it as a makeshift VPN. In fact, there’s so much ground to cover that this won’t be the last Linux Fu to talk about ssh. But enough setup, let’s get to the tricks.
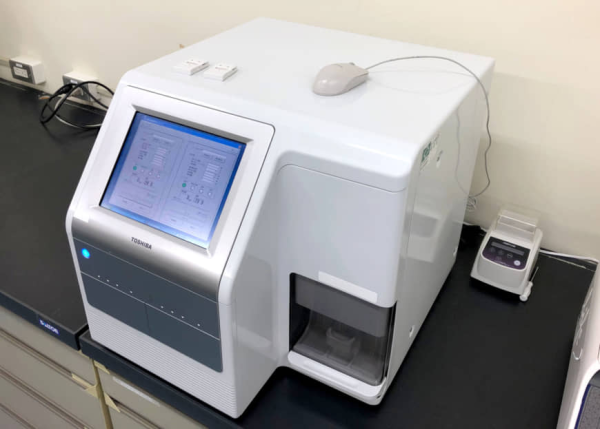
Can you imagine a near future where your family doctor can effectively prick your finger and test you for a dozen or so types of cancer? Currently, cancer detection is a time-consuming and expensive process. Existing methods of screening for cancer usually involve taking a whole lot of blood and running tests that cost thousands of dollars. But Toshiba has created a cancer-detecting machine that sounds like something straight out of science fiction.
The machine is about the size of a small office copier, and it looks like one, too. But this small machine can do some powerful tricks. Toshiba claims that the machine can detect 13 types of cancer from a single drop of blood with 99% accuracy. What’s more impressive is that it can do this under two hours, as opposed to days or weeks depending on laboratory backlog. Most importantly, they are aiming to do this entire battery of tests for about $180. Ideally, this machine will do everything that current blood cancer detection equipment does, just better, faster, and with fewer resources.
Some of the cancers the machine can test for have been previously difficult to detect, like ovarian, pancreatic, and esophageal cancer. But this machine can screen for all three of these — great news for early detection of these ravaging cancers — as well as breast, prostate, gastric, colon, liver, biliary tract, bladder, lung, brain, and sarcoma. The only catch is that the machine can’t pinpoint which cancer exactly, it only knows if microRNA one or more of the 13 came up.
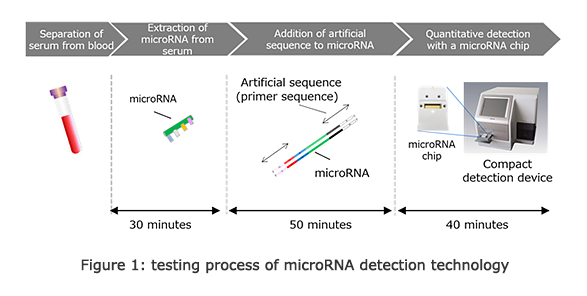
So, how does it work? Cancer cells secrete certain types of microRNA into the bloodstream that healthy cells don’t. The machine works by assessing the different types of microRNA that show up in the sample drop, and studying their concentrations. Their work builds on that of Toray Industries, who announced earlier this year that they had made a cancer-detection chip based on microRNA accumulation that is 95% accurate. Development of this chip follows on the heels of research that finds testing for microRNA in bloodwork has the potential to detect cancers in earlier stages, and in some cases like for bowel cancer, with a much less invasive testing procedure.
Toshiba, in partnership with the National Cancer Center Research Institute and Tokyo Medical University will conduct a trial of the machine next year. If the trial is successful, they hope to commercialize it soon after.
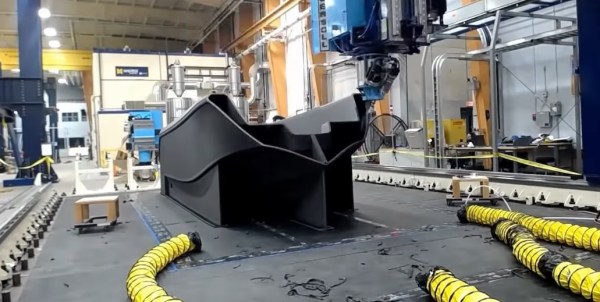
We’ve seen some pretty big polymer 3D printers, but nothing quite as big as the University of Maine’s 3D printer with a 22,000 ft³ (623 m³) build volume. It holds the Guinness World Record for the largest polymer 3D printer, and with that size comes some interesting challenges and advantages.
You might have already seen the video of it printing an entire patrol boat hull in a single piece, and would have noticed how it printed at a 45° angle. Due to the sheer weight and thermal mass of the print bead, it cannot bridge more than an inch, since it’ll just sag. A 45° overhang angle is about all it can manage, but since the layers can be tilted at that angle, it ends up being able to print horizontal roofs with no support. A 10 mm nozzle is used and the extruded line ends up being 12.5 mm in diameter with a 5 mm layer height. The boat mentioned above was printed with carbon ABS, but it can reportedly use almost any thermoplastic. It looks like the extruder is a screw extruder from an injection moulding machine, and is likely fed with pellets, which is a lot more practical than filament at this scale. Check out the video below by [Paul Bussiere] who works in the Advanced Structures & Composites Center at the University. He also does a very interesting interview with his boss, [James M. Anderson].
We’re going to go out on a limb here and say that wherever you are now, a quick glance around will probably reveal at least one LED. They’re everywhere – we can spot a quick half dozen from our desk, mostly acting as pilot lights and room lighting. In those contexts, LEDs are pretty mundane. But what if a little more flash could be added to the LEDs of the world – literally?
That’s the idea behind LightAnchors, which bills itself as a “spatially-anchored augmented reality interface.” LightAnchors comes from work at [Chris Harrison]’s lab at Carnegie Mellon University which seeks new ways to interface with computers, and leverages the ubiquity of LED point sources and the high-speed cameras on today’s smartphones. LightAnchors are basically beacons of digitally encoded data that a smartphone can sense and decode. The target LED is modulated using amplitude-shift keying and each packet contains a data payload and parity bits along with a pre- and post-amble sequence. Software on the phone uses the camera to isolate the point source, track it, and pull the data out of it, which is used to create an overlay on the scene. The video below shows a number of applications, ranging from displaying guest login credentials through the pilot lights on a router to modulating the headlights of a rideshare vehicle so the next fare can find the right car.
An academic paper (PDF link) goes into greater depth on the protocol, and demo Arduino code for creating LightAnchors is thoughtfully provided. It strikes us that the two main hurdles to adoption of LightAnchors would be convincing device manufacturers to support them, and advertising the fact that what looks like a pilot light might actually be something more, but the idea sure beats fixed markers for AR tracking.
We admit that a hack enabling a 34-year-old video game peripheral to be controlled by a mobile app wasn’t something we were expecting to see today, but if controlling something with something else isn’t the definition of a classic hack, we don’t know what is. The folks at [Croxel Inc.] worked out a way to control R.O.B. using a phone app to demo out their expertise in building hardware and software prototypes, a service they offer at their website.
R.O.B. was a little robot with movable clamp arms bundled with the 1985 release of the NES, an effort by Nintendo of America to drive sales of the console after the gaming crash of 1983 by making it look less like a video game and more like a toy. The robot receives inputs from light sensors in its head, which would be pointed towards the TV playing one of the only two games released with support for it. [Croxel] used this to their advantage, and in order to control the robot without needing a whole NES, they fabricated a board using a BGM111 Bluetooth Low-Energy module which can receive outside inputs and translate them to the light commands the robot recognizes.
To avoid having to modify the rare toy itself and having to filter out any external light, the hack consists of a 3D printed “goggles” enclosure that fits over R.O.B.’s eyes, covering them entirely. The board is fitted inside it to shine the control light into its eyes, while also flashing “eye” indicators on the outside to give it an additional charming 80s look. The inputs, which are promptly obeyed, are then given by a phone paired to the module using a custom app skinned to look like a classic NES controller.
In our opinion, the primary evidence of a properly lived childhood is an enormous box of every conceivable Lego piece, from simple bricks to girders and gears, all with a small town’s worth of minifigs swimming through it. It takes years of birthdays and Christmases to accumulate a Lego collection best measured by the pound, but like anything worth doing, it’s worth overdoing.
But what to do with such a collection? Digging through it to find Just the Right Piece™ can be frustrating, and bringing order to the chaos with manual sorting is just so impractical. How about putting some of those bricks to work with a machine-vision Lego sorter built from Lego?
[Daniel West]’s approach is hardly new – we’ve even featured brick-built Lego sorters before – but we’re impressed by its architecture. First, the mechanical system is amazing. It uses a series of conveyors to transport bricks from a hopper, winnowing the stream down as it goes. The final step is a vibratory feeder that places one piece on a conveyor at a time. Those pass under a camera attached to a Raspberry Pi, where OpenCV does background subtraction from the video stream, applies bounding boxes to the parts, and runs the images through a convolutional neural network (CNN) that’s been trained on a database of every Lego part. Servo-controlled gates then direct the parts into one of 18 bins. See it in action in the video below.
We must admit that we’re not sure what the sorting criteria are, as some bins seem nearly as chaotic as the input mix. Still, we appreciate the fine engineering, and award extra style points for all the Lego goodness.