Some people will tell you that YouTube has become a vast wasteland of entertainment like the boob tube before it. Live streaming doesn’t help the situation much, and this entry level webcam live-stream server isn’t poised to advance the art.
We jest, but only a little. [Mike Haldas] runs a video surveillance company that sells all manner of web-enabled cameras and wondered what it would take to get a low-end camera set up for live streaming. The first step was converting the Zavio webcam stream from RTSP (real-time streaming protocol) to the standard that YouTube uses, RTMP (real-time messaging protocol). Luckily, FFmpeg handles that conversion, so he compiled it for his MacBook Pro and set up a proof of concept. It worked, but he needed a compact solution that would free up his laptop. Raspberry Pi to the rescue – after loading a bunch of libraries and a four-hour build and install of FFmpeg, the webcam was streaming 1080p video of [Mike]’s sales office. He was worried that the Pi wouldn’t have the power needed for the job, and that it would be unstable. But as of this writing, the stream below has been active for six days, and it’s riveting stuff.
Not all hacks have to be deeply technical. Sometimes a good show of skill is just as impressive. [lyberty5] takes two completely different hunks of plastic and somehow epoxies them into a convincing and, most impressively, reliable chimera.
While the WiiMote’s motion controls certainly caused a lot of wordy debate on the Internet when it was debuted. While everyone and their grandmother who owned a game company rushed out to copy and out-innovate it once they saw Nintendo’s hoard of dragon gold. Most game designers had other thoughts about the concept, mostly that it wouldn’t do for a platformer. So the gamer caught in the middle of it all had to rotate their grip-optimized rectangle 90 degrees and blister their thumbs on tiny buttons to play. Continue reading “Learn Some Plastic Techniques With This SNES WiiMote Mod”→
Does everyone watch a load of videos on YouTube that are somewhat on the unadmissibly geeky side? In my case I might not care to admit that I have a lot of videos featuring tractors in my timeline. The mighty Russian Kirovets hauling loads through the impossible terrain of the taiga, tiny overloaded 2WD tractors in India pulling wheelies, and JCB Fastracs tearing around the British Fenland. You can take the girl off the farm, but you can’t take the farm out of the girl.
So my recommendations have something of an agricultural flavor. Like the video below the break, a 1917 silent film promoting the Ford Model B tractor. This one was eye-catching because it was a machine I’d not seen before, a rather unusual three-wheeler design with two driving wheels at the front and a single rear steering wheel.
During the early years of the twentieth century the shape of the modern tractor was beginning to evolve, this must have been a late attempt at an alternative. Speaking from the viewpoint of someone who has operated a few tractors in her time it does not look the easiest machine to control, that cloud of exhaust smoke surrounding the driver would not be pleasant, and the operating position hanging over the implement coupling at the rear does not look particularly comfortable or safe.
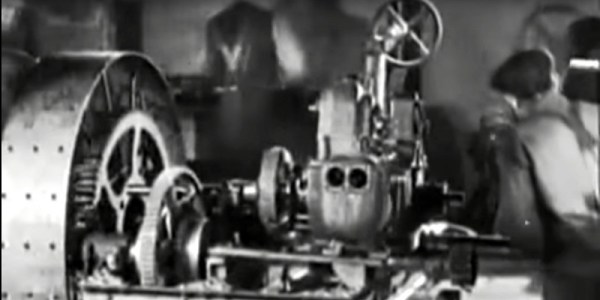
The film has a charming period feel, and tells the tale of a farmer’s son who tires of the drudgery of manual farm labor, and leaves for the city. He finds a job at the tractor factory and eventually becomes a tractor salesman, along the way meeting and marrying the daughter of a satisfied customer. He returns home with his bride, and a shiny new tractor to release his father from ceaseless labor. Along the way we gain a fascinating look at agriculture on the brink of mass mechanization, as well as the inside of a tractor factory of the time with an assembly sequence in which they appear to use no fasteners.
[Image Source: Tractor Industry Fraud on Farm Collector]All of this is very interesting, but the real nugget in the story lies with its manufacturer. This is a Ford Model B tractor. But it’s not a Ford Model B. Confused? So, it seems were the customers. The Ford we all know is the Michigan-based motor company of Henry Ford, who were already very much a big name in 1917. This Ford however comes from the Ford Tractor Co, of South Dakota, an enterprise set up by a shady businessman to cash in on the Ford brand, manufacturing an already outdated and inferior machine backed up by dubious claims of its capabilities.
On the staff was an engineer called Ford who lent his name to the company, but he bore no relation to Henry Ford. The company didn’t last long, collapsing soon after the date of this film, and very few of its products survived. It did have one legacy though, the awful quality of one of its tractors is reputed to have been the impetus behind the founding of the Nebraska Tractor Test Laboratory, the place where if you sell a tractor in the USA, you’ll have to have it tested to ensure it performs as it should. In their museum they house one of the few surviving Ford Model B tractors.
Meanwhile the Ford in Michigan produced their own very successful line of tractors, and their Fordson Model F from the same year is a visible ancestor of today’s machines. But as the video below shows, there’s nothing new about a fake.
Browsing YouTube may prove to be your largest destroyer of productive time outside of Hackaday, once you have started looking at assorted Lincolnshire plumbers or young Ukrainians doing dangerous stunts it’s easy to lose an hour with very little to show for it. There is so much to divert our attention, it’s a wonder that any of us ever make anything!
So to ensure you lose a further quarter hour today, we’d like to bring you [Jesper Broe]’s demonstration and teardown of his latest oscilloscope. This might seem unpromising when we tell you it’s a single-trace model with a bandwidth of 10MHz, but don’t give up. This is a RIMEDA C1-112, a portable instrument made in Lithuania when the country was part of the Soviet Union, and its party piece is that it contains a digital multimeter with a vector display using the oscilloscope CRT.
We’re shown the compact device being unpacked, then put through its paces as an oscilloscope. It gives useful results above 10MHz, but it is visibly losing amplitude and eventually it has trouble triggering as the frequency increases. Interestingly all the controls work in the opposite direction to the ones you will be used to, anticlockwise rotation increases rather than decreases. Then we’re shown the multimeter function, which is compared to a modern DMM and found to be still pretty accurate after nearly three decades.
The ‘scope’s lid is then removed, and we see something of the logic boards that produce the digital display. A host of Soviet K155 series logic ICs are at the heart of it, and at the end of the video we’re shown a period review in Russian with a glimpse at the waveforms they produce to vector draw the figures.
Take a look at the video below the break, we’re sure you’ll agree it’s an instrument that many of us would still find useful today.
We’ve noticed a lot of musical groups are named after insects. Probably has something to do with the Beatles. (If you study that for a while you’ll spot the homophonic pun, and yes we know that the Crickets inspired the name.) There’s also Iron Butterfly, Adam Ant, and quite a few more. A recent art project by a Mexican team — Micro-ritmos — might inspire some musical groups to be named after bacteria.
The group used geobacter — a kind of bacteria found in soil — a Raspberry Pi, an Arduino, and a camera to build an interesting device. As it looks at the bacteria and uses SuperCollider to create music and lighting from the patterns. You can see a video of Micro-ritmos, below.
What does it take to go from concept to dropping a finished product into the hands of the end user? Gather ’round for a story that pulls people and parts from around the world to make one killer piece of hardware art.
The Isle of Lewis is the largest of the Scottish Outer Hebrides, sitting in the North Atlantic off the west coast of the Scottish mainland. It is the first landfall after thousands of miles of ocean for a continuous stream of Atlantic weather systems, so as you might imagine it is a place in which there is no shortage of wind.
It is thus the perfect situation for a wind power startup, and in the aptly-named Windswept and Interesting Ltd it has one that is pushing the boundaries. Their speciality is the generation of power from spinning kites, arrays of kites that transmit power to a ground-based generator through the rotation of their lines, and because they release their designs as open source they are of extra interest to us.
Of course, if you are a seasoned reader you’ll now be complaining that we’ve covered this story before when they had an entry in the 2014 Hackaday Prize, so what’s new? The answer is that the 2014 story was a much earlier iteration than their current multi-level kite array, and that they have now reached the point of bringing their products to market. You can buy one of their prototypes right now, and there is a soon-to-be-launched crowdfunding campaign for their latest model. It’s not exactly cheap, but this first product is the result of 5 years of product development, and it is pretty obvious that more is on the way. For any open hardware startup to stay afloat that long is an impressive achievement, to do so in a field in which you are not surrounded by a huge supporting industry in the way for example electronics startups are is nothing short of amazing.
If you would like to have a go at building one of their spinning kites, you can do so with full instructions released under a Creative Commons licence, but for non kite builders their website is a fascinating read in its own right. Their YouTube channel in particular has a wealth of videos of previous tests as well as design iterations, and is one on which many readers will linger for a while. Below the break we’ve put one of their most recent, a montage showing the kite evolution over the years.



![[Image Source: Tractor Industry Fraud on Farm Collector]](https://hackaday.com/wp-content/uploads/2016/11/ford-tractor-company-poster.jpg)