Swarms of robotic insects incapable of being swatted away may no longer be the product of science fiction and Black Mirror episodes. A team from EPFL’s School of Engineering has developed an insect propelled at 3 cm/s, dubbed the DEAnsect.
What makes this robot unique is its exceptional robustness. Two versions of the robot were initially developed, one tethered with ultra-thin wires capable of being squashed with a shoe without impacting its functions and the second fully wireless and autonomous. The robot weighs less than 1 gram and is equipped with a microcontroller and photodiodes to recognize black and white patterns.
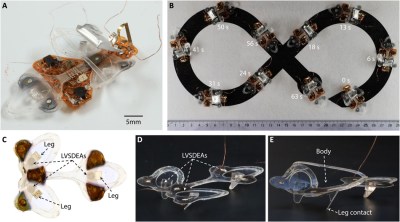
The insect is named for its dielectric elastomer actuators (DEAs), an artificial muscle that propels it with vibrations and enables it to move lightly and quickly.
The DEAs are made of an elastomer membrane wedged between soft electrodes that are attracted to each other when a voltage is applied, compressing the membrane. The membrane returns to its original shape when the voltage is turned off. Movement is generated by switching the voltage on and off over 400 times per second. The team reduced the thickness of the membranes and developed soft, highly conductive electrodes only several molecules thick using nanofabrication techniques. They plan on fitting even more sensors and emitters to allow the insects to communicate directly with one another for greater swarm-like activity.
Continue reading “A Soft Robotic Insect That Survives The Fly Swatter”