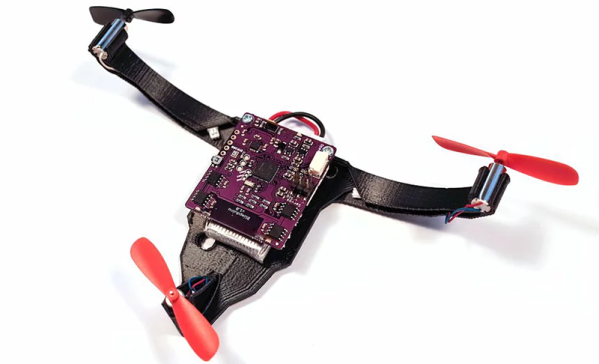
We love a good drone build here at Hackaday, but no matter how much care is taken, exposed propellers are always a risk: you don’t have to look far on the web to see videos to prove it. Conventional prop-guards like those seen on consumer drones often only protect the side of the propeller, not the top, and the same problem goes for EDFs. [Stefano Rivellini]’s solution was to take some EDFs and place them in the middle of large carbon fibre thrust tubes, making it impossible to get anywhere near the moving parts. The creation is described as a bladeless drone, but it’s not: they’re just well hidden inside the carbon fibre.
We’re impressed by the fact that custom moulds were made for every part of the body, allowing [Stefano] to manually create the required shapes out of carbon fibre cloth and epoxy. He even went to the trouble of running CFD on the design before manufacture, to ensure that there would be adequate thrust. Some DJI electronics provide the brains, and there’s also a parachute deployment tube on the back.
Whilst there’s no doubt that the finished drone succeeds at being safe, the design does come at the cost of efficiency. The power electronics needed are far more serious than we’d usually see on a drone of this size, to compensate for the extra mass of the thrust ducts and the impediment to the air-flow caused by the two 90° bends.
One of our favorite EDF drone innovations that we saw recently was this thrust-vectored single rotor device, a really unique idea that took some interesting control methods to implement.
[Thanks, Itay]
Continue reading “A Safe, Ducted Drone With No Visible Blades”